There are many ways to find true north.
Journal of Navigation: The Seven ways to Find Heading, Kenneth
Gade, 2016, 16 pages (The_Seven_Ways_to_Find_Heading.pdf).
Method
|
Examples
|
| 1. Magnetic vector field of the Earth. |
Magnetic compass
|
| 2. Angular velocity of the Earth.
See Stellar
time. |
Gyro-compass (gyroscopes)
|
| 3. Vector between external objects. |
Star Tracker (MD1), downward camera in UAV
|
| 4. Vector from own vehicle to external
object(s). |
Bearings to objects with known position
|
| 5. Body-fixed vector. |
Multi-antenna GNSS
|
| 6. Vehicle velocity vector. |
Doppler sensor or camera
|
| 7. Vehicle acceleration vector. |
Measure position or speed
|
There is a fixed relationship between time and position on Earth
that shows up in a number of ways. Navigation,
Surveying, Time
and Frequency, Gyroscopes, Flywheels , Astronomy
as well as North Finding are all interrelated.
Some crude ways are to use an analog wrist watch and point the
minute hand to the Sun and then a North-South line is half way
between the minute hand and 12:00, this is called the Boy Scout
method (Wiki).
Or that moss grows on the North side of tree trunks.
Following are some more accurate ways.
Magnetic Compass
Use a magnetic compass and correct for the local magnetic
declination (Wiki),
my sensors web page on magnetism.
A problem with this is applying the correction in the correct
direction.
Another problem is that the compass needs to be level, if it's
tipped there will be an error.
Another problem is using a compass that's accurate enough.
The compass that's part of a surveying
instrument, like the Leitz 115
transit, is good to better than one degree.
A compass with a single piece needle will tend to point more in
the up-down direction than horizontally in most parts of the world
and so needs to have a balancing weight added to keep the needle
level and so will only work over a limited range of latitudes.
Noon Sun
There are a number of methods of using the fact that the Sun is at
true South (or North for the southern hemisphere) at local noon
(not clock noon).
One way is to mark the path of the shadow cast by the tip of a
vertical pole. A line from the base of the pole to the
closest point of the shadow path is on a North-South line.
Another way to to determine time when the Sun is due south
(transit time) at:
http://aa.usno.navy.mil/data/docs/RS_OneDay.php
Using a vertical pole mark the shadow of the tip at the transit
time. A line from the base of the pole to the closest point
of the shadow path in on a North-South line.
There are solar attachments for some transit surveying instruments that allow
finding North based on the Sun's position.
The Dipleidscope is designed to tell you
when it's exactly noon, but it could be used to find North if you
know the time when the Sun transits (see above).
A Noon Mark (Wiki)
is a type of Sundial (Wiki) that is
constructed on a South facing vertical wall and incorporates the
Equation Of Time (Wiki).
The EOT corrects Sundial time from being off by as much as 16
minutes to better than 1 minute of time based on the date.
Or, more accurately if the EOT is computed for the current year.
It can also be implemented as a ceiling
dial by means of a small mirror.
Skylight
The polarization of the sky in both sunlight and moonlight is
polarized and so can be used to determine North. See: Skylight
Compass.
Stars
Stars can be observed by knowing the time that they transit the
local meridian just as was done for the Sun. A problem is
that you don't want to use a star that transits directly
overhead, but rather one that transits not too far above the
horizon. For more on this and the limiting accuracy see my
Stellar Timekeeping web
page. (Note: Astronomical "seeing" caused by atmospheric
turbulence limits the precision of a single star observation to
single digit milli arc seconds of angle.)
Theodolites have right angle
eyepiece attachments to allow looking at stars that are high in
the sky. Also Pilot
Balloon (PiBal) theodolites have the eyepiece at right
angles to the telescope axis to allow looking skyward. The
Wild T16 91 arc minute) or T2 (1 arc second) will result in
precision North is the hour angle of Polaris is taken into
account.
North Star
The North Star (Wiki) is
not at the celestial pole (Wiki)
and so circles the celestial pole. The error in finding
North if you use the North star at a random time can be on the
order of 3/4 of a degree.
One way to eliminate this error is to use a Polaris
finderscope. This is a small telescope with circular rings
that are offset from the center line of the scope by the offset
of Polaris. When aligned with the center point at the
celestial pole you will see Polaris on one of the rings.
As time goes by Polaris will stay on the same ring. This
is one way to align an astronomical telescope, but it can take
some time since you need to wait for the sky to rotate.
Another way to eliminate the problem of Polaris not being due
North is to determine when Polaris transits. That happens
two times every day, once when Polaris is directly above the
celestial pole and again when it's below the pole. If you
follow the North star with a transit and stop tracking it when
it transits then your have found North.
A normal surveying theodolite can not sight object that are
high in the sky since the eyepiece gets too close to the base to
allow your head to be there. There are right angle
adapters (T2 Figures 11, 12, 13 &
14) that will allow this but they are a complication.
The surveying transits designed
to track pilot a balloon have a
GPS
The AG8 gyroscope North Finding System was
replaced by the "Gun Laying" (Wiki)
application in the PLGR and DAGR GPS receivers.
The accuracy is easily better than one mil (Wiki).
There are two Gun Laying (Azimuth Determination) methods that
can be done with either the DAGR
or Polaris:
- one uses a single GPS receiver that's taken from the
starting stake to the far stake and then calculates the
bearing and distance between the stakes.
- the other uses two GPS receivers (a base and a rover) and is
more accurate.
A less accurate, but quick and easy way to find North with the
DAGR or Polaris is to use it's internal
magnetic compass. Since the DAGR knows it's Lat and
Lon and it has some version of the World
Magnetic Model it can be setup to display true bearings by
applying the WMM to the magnetic bearing. Note: You
must hold the GPS horizontally level, best on a table or other
surface.
There are other GPS methods but none of them come close the the
Gun Laying System in accuracy.
The key idea is that the center of
mass if below the horizontal gyroscope spin axis. That's so
say that when the gyro is not spinning the weight pulls down on
the gyro and brings the spin axis to a horizontal position.
This way when the spin axis is not parallel to the earth's spin
axis then the gyro will precess in such a way as to cause the spin
axis to tilt either up or down. This tilt will raise the
weight which will in turn produce torque forcing the gyro spin
axis to move to the East or West, i.e. to come closer to being
parallel with the earth's spin axis. This system only works
on land, in a vehicle any acceleration will effect the weight and
cause problems.
Hunting
The gyroscope oscillates back and forth about true north with a
period that depends on the rotational momentum of the gyro.
Large gyros, like used in early ship gyrocompass systems might
have a period of oscillation about North on the order of a few
hours. A small earth based pendulous gyrocompass, like used
for surveying, might have a period of a few minutes. Since
the hunting is continuous and the method of finding the center of
the East and West excursions involves measuring over a number of
cycles, i.e. tens of minutes either the bearings need to be
exceptionally good or the flywheel needs to be powered. This
is way Foucault was not able to make this demonstration.
Note for this undamped case if the spin axis starts at x degrees
to the West of North it will oscillate between x degrees West and
x degrees East of North forever.
The example on pg 87:
We = 72.9E-6 rad/sec (aprox 4 seconds per revolution)
M = 4E6 gm cm
2/sec
Lat = 40 deg North
Mp = 80E3 dyne cm
Starting angle = 10 deg West of North
T = 0 when at 10 deg West
Period = 99 minutes
Gyroscopes: Theory and Design, paragraph 5-8 Equations of
Motion - Pendulum Gyro, pg 85
References
Lightweight Gyro Azimuth Theodolite (Lear
North Seeking Gyro Model No. 11ng530a) by Robert T.
Flowe
Engineering
Test Report; Lightweight Gyro Azimuth Theodolite (Lear
North-Seeking Gyro Model No. 11NG530A) 21 Feb 1963
Patents
3146530 Pendulous
North
Seeking
Gyroscopic
Assembly,
Harry
N. Eklund (Lear Siegler), Mar 9, 1965 -
33/321,
33/333,
33/363.00R,
33/275.00G,
33/327,
74/5.00R
- North Seeking
to determine the direction of geodetic North
3172213
North
Seeking Gyroscope,
Harry
N. Eklund (
Lear
Siegler Inc), Mar 9, 1965 -Tripod &
theodolite,
33/327,
33/324,
74/5.1,
74/5.5,
33/275.00G,
33/346,
336/135,
336/30
3512264
MERIDIAN-SEEKING INSTRUMENT**,
Ambrosini
Leonard R (
Lear
Siegler Inc), May 19, 1970,
33/324,
74/5.60E,
33/320,
74/5.60R
2510068
|
Gyrocompass
|
Sperry
|
ship use
|
3172213
|
see
above
|
Lear Siegler
|
North Finding
|
3258976
|
see
below
|
Gen Precision
|
Tripod mounted |
3817508
Circular
connection bands for a suspended body, D
Bergstrom, D
Clark, (Lear
Siegler Inc), Jun 18, 1974, 267/160
3863357 Power driven band clamp for
pendulous north seeking gyroscopes, Clark
David C, Knapp
Ralph E (Lear
Siegler, Inc.), Feb 4, 1975,
33/324
3863355 Power transfer assembly, Darryl
K Bergstrom, David
C Clark, Lear
Siegler Inc, Feb 4, 1975,
33/324,
33/354
3890718 Method for
determining astronomic north by gyrocompass, Gregerson
Leslie F, Symonds
Gordon R, Jun 24, 1975, 33/301,
33/324, 74/5.5, 368/118
Uses light beam
and photo sensors to time oscillations.
3988659
Meridian seeking
instrument, Leonard
R. Ambrosini (Lear
Siegler, Inc.), Oct 26, 1976,
318/648,
318/623,
33/324,
33/275.00G,
318/624
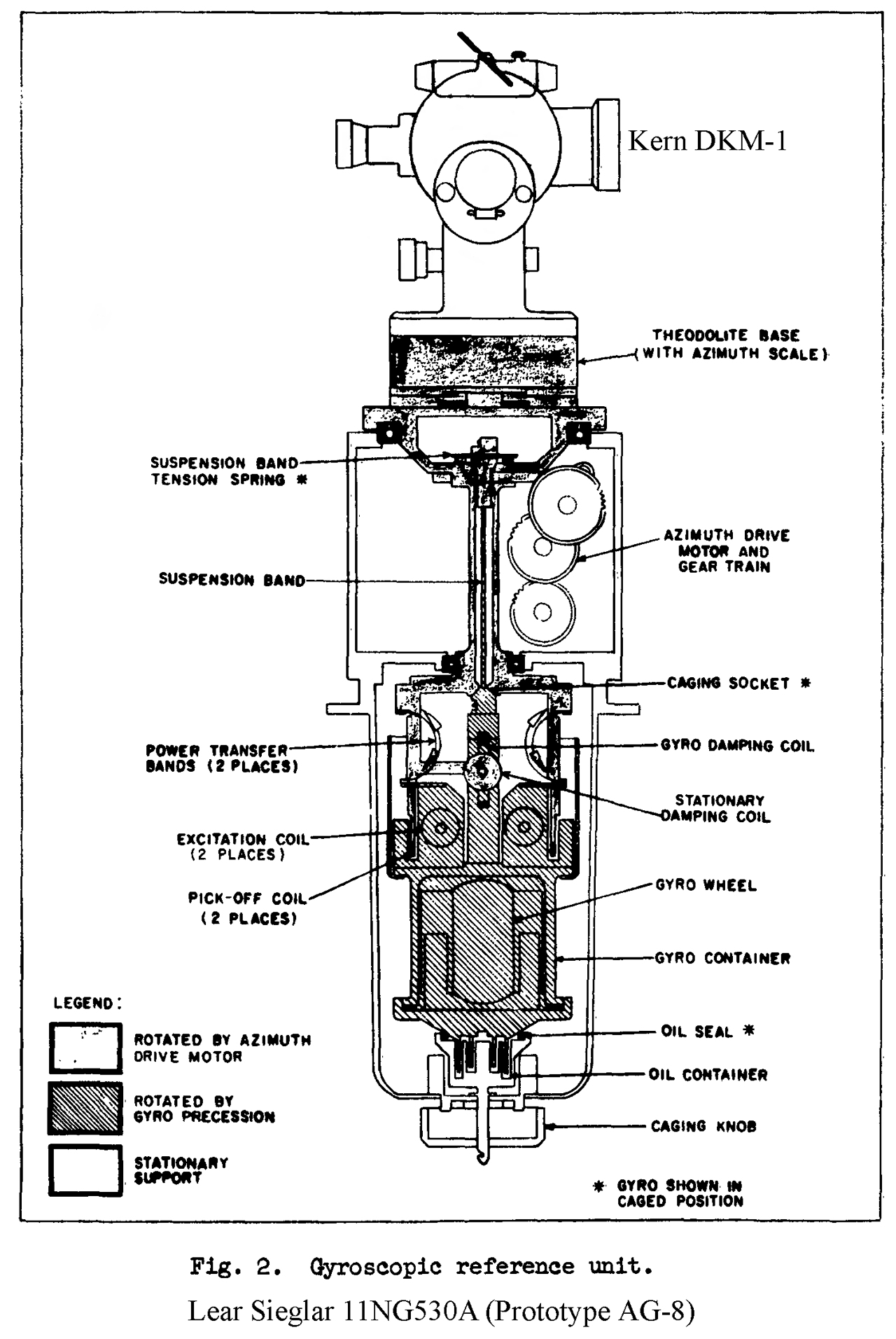
This is the AG8 (AG-8) North Finding (Seeking)
gyroscope.
3997975 Calibration of a
meridian seeking instrument, Ralph
E. Knapp (Lear
Siegler, Inc.), Dec 21, 1976,
33/324,
318/689,
318/648,
33/326
AG8 Calibration in field
Fig 1 AG-8 theory of operation
|
AG-8 Patent 3988659 Fig 2

|
From the book "Surveying Instruments and their Operational
Principles" Chapter 2.5.2 Gyroscopic Theodolite

Manuals
TM 5-6675-250-10 Survey Instrument: Azimuth, Gyro, Lightweight,
Model AG-8, Type 1 (6675-00-062-5575)
TM 5-6675-250-10-HR Survey Instrument: Azimuth, Gyro, Lightweight,
(Lear Siegler, Inc. Model AG-8), Type 1, NSN
6675-00-062-8579
TM 5-6675-250-20 Survey Instrument: Azimuth, Gyro, Lightweight,
Model AG-8, Type 1 (6675-00-062-8579)
TM 5-6675-250-20P Survey Instrument: Azimuth, Gyro, Lightweight,
(Lear Siegler, Inc. Model AG-8 and AG-8A) NSN
6675-00-062-8579 Jan 1976
TM 5-6675-250-34 Survey Instrument: Azimuth, Gyro, Lightweight,
(Lear Siegler, Inc. Model AG-8 and AG-8A) NSN
6675-00-062-8579 Dec 1975
TM 5-6675-250-34P Survey Instrument: Azimuth, Gyro, Lightweight,
(Lear Siegler, Inc. Model AG-8 and AG-8A) NSN
6675-00-062-8579 Jan 1976
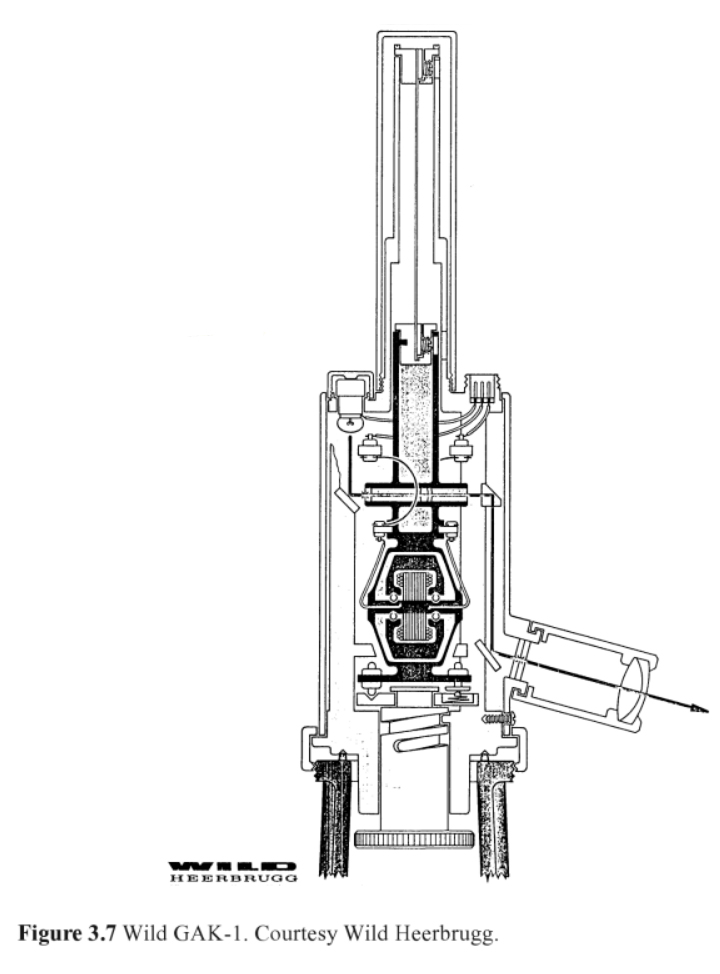
Wild Surveying Gyros
There are two models that use identical gyro mechanisms made by
Perkin Elmer.
The gyro never settles down to a single bearing but instead it
continuously oscillates about true North.
So there's a number of ways to figure out where North is, one way
is to note the left and right peak azimuth readings and then use
the mean. But this will not work with the T2 theodolite
because it's fine motion screw can not track over the peak-to-peak
oscillation range. Other methods depend on timing various
aspects of the oscillation.
ARK 2 Gyro Aiming
Includes a built-in telescope
Auxiliary Equipment
GKK3 DC - AC Converter
GKB2 Battery
GKL3 Batt. Charger
GST10-2 Tripod
Wild T16 theodolite PN 560247 (maybe part of GG3-1 NSN:
6675-01-289-8481)
ARK 2 Aiming Circle

|
GAK 1 Gyro Attachment
|
2930240 Gyroscopic surveying compass, Dietrich
Wartenberg, Otto
Rellensmann, Mar 29, 1960,
74/5.00R,
33/327,
74/5.7,
33/275.00G,
356/149
3001290 Gyroscopic compass, Karl-Heinrich
Stier, Otto
Rellensmann (Lear
Inc), Sep 26, 1961,
356/148,
33/285,
33/315,
33/275.00G
Air or Gas Bearing
This is an improved version of the Pendulous. It's more
complicated in exchange for a much shorter period of oscillation.
3173215 uses air bearing gyro like: 2925736, 2926530, 2938157
Torquer & Pickup
are described in
2926530 AUTOMATIC
CONTROL
SYSTEM
FOR
A PIVOTED PLATFORM - inertial platform
A one degree of freedom gyro rotor
that has drift typically used in ships and aircraft since it's
more accurate than a simple magnetic compass.
The magnetic compass has a big error if it's not held horizontally
or near metal or wires carrying electrical currents. Totally
inoperable in a metal submarine or armored tank.
Rate gyros are used to measure
turning about a single axis. These are not gimbled and are
similar to a motor, i.e. just a cylindrical can that contains the
gyro and some type of pickoff mechanism that can put out a signal
if the can moved in such a way as the long cylindrical axis is
tipped relative to where it was. If the cylindrical axis is
translated so that the new vector is parallel to the old vector,
not output will result.