June 2015 - I'm interested in the DC PM motors with a 3.17mm
(1/8") shaft because they are reasonably priced ($3 to $11) and
are commonly used in RC vehicles that are about 1 foot in
size. The shaft diameter of a motor is related to it's
power output, for 1/8" shafts that amounts to about 50 to 200
Watts (746 Watts is 1 horsepower).
For a given shaft size the armature and frame magnetics will be
about the same. The main variation is in what size wire is
used to wind the armature and that relates to how many turns
will fit.
The best short paper on permanent magnet DC motors is "Characteristics
of DC Motors.pdf" by Rutgers Prof. Dunbar P. Birnie.
Mabuchi Model Numbers
Mabuchi Motors -
Technical Guide - Part
Number List
Decoding Mabuchi part numbers: L1L2-N1N2N3L3L4-N4N5TTTT
L1 Shape: Flat (F), Round (R), Square (S)
L2 Brush: Metal: (A, E), Precious
Metal (F), Carbon (C, H, K, S, T, Z)
N1 Armature Diameter: small lto large (J, K,
M, N, 1, 2, 3, 4, 5, 6, 7, 8)
N2 Housing Length code:
N3 Number of Armature Poles: 3 (0), 5 (5), 6
(6), 7 (7), 8 (8), 10 (A), 12 (B)
L3 Magnet: C Isotropic (R), Ring Isotropic (T),
Anisotropic or Rare-Earth (P, S, V, W), Rubber (C, E, F)
L4 Custom Design: Encoder (W)
N4 wire diameter tenth of mm: If number tenths of
mm, if letter A = 1mm
N5 wire diameter hundredths of mm: 0.01mm (1),
0.05mm (D), 0.055mm (Z)
TTT Turns per slot: might be 2, 3 or 4 digits.
Notes:
Stall Torque and Stall Current are proportional to
1/(wire_diameter^2) - I tried this on some data and at first
glance I don't see the correlation.
Pwr out (Watts) = [N (rpm) * T (mN-m)]/9550
The 4 cardinal performance points are: No load RPM and Current,
Stall Torque and Current.
Units
K is the relationship between applied voltage (Volts) and the
speed in radians (Wiki)
per second (symbol w). Since speed is commonly given as
Revolutions per Minute that needs to get converted.
RPM / 60 = Rev Per Second (RPS).
RPS * 2 * PI = Radians per second
For example a For the Mabuchi RS-545SH: motor
that turns 6800 RPM at 12 Volts has w = 2* PI * 6800 / 60 = 712
radians per second.
The electrical circuit looks like a constant voltage drive,
routed through the internal resistance of the armature to a
virtual battery whose back EMF (Vbemf) is determined by the
motor RPM.
Vbemf = K * 2* PI* Rev/Sec
or
K = Voltage / (radians per sec) , = 12 / 712 = 0.01685
The electrical equation is:
Vdrive = I * Rinternal +Ebemf
Then:
Tstall = K * V / R
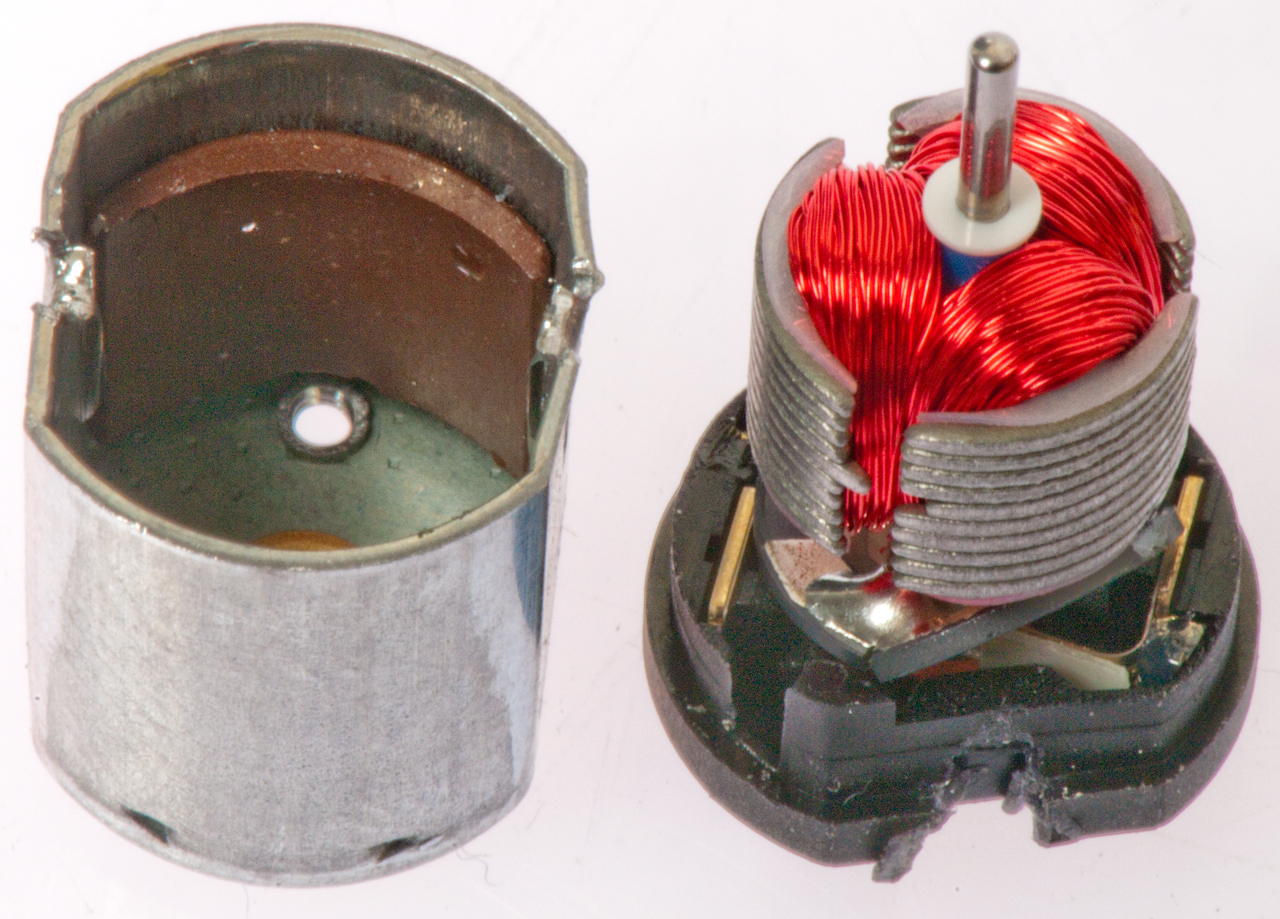
"Turns" refers to the number of times a wire is wound around
one of the poles of the armature.
For example the Gilbert
DC Motor (used in Erector Sets)
has a 3-pole armature and each pole maybe a couple dozen turns.
The force on a wire in a magnetic filed depends on the magnetic
field strength and the current in the wire. Since the
magnetic field is fixed for a given motor the torque depends on
the number of turns and the current.
For example
The Mabuchi
RS-550PC (see below) we know at 7.2 V drive the no load speed is
supposed to be 13500 RPM.
So K = 2 * PI * 13500 / 60 = 1414
The stall torque is given as 3700 g-cm with a current of 83
Amps. The back EMF at stall is zero, so
R = V / I = 7.2 V / 83A = 0.0867 or 86.7 milli Ohms.
Measuring R Directly
Note: A direct measurement of R is very difficult.
If a DC measurement is made there will be errors because any
dissimilar metals will generate DC voltages that are unknown,
see my web page on Kelvin (4-wire)
resistance measurements. The 50 milli Ohm limit of
the HP 34401 DMM is very close to the resistance of the RS-550PC
motor.
A direct measurement using an AC test method will have an error
because of the inductance of the windings. See the HP 4328 Milliohmmetere web page for
an example.
It may be possible to make a swept frequency impedance
measurement using the HP 4395A and by fitting the data to an
equivalent circuit separate the real and imaginary parts.
This may also be possible using an LCR meter that has a series
equivalent circuit representation, like the HP 4274 & HP 4275 LCR meters.
Back EMF (Wiki)
When the armature is stalled there is no back EMF, but as soon
as the armature is turning it's generating a back EMF that
subtracts from the applied voltage thus reducing the armature
current. Vbatt -Vemf = Iarm * Rarm.
Note if the motor has it's shaft turned by an external torque
then it will act as a generator and the voltage is exactly the
same as the back EMF (assuming the load resistance is very high,
i.e. not using the generator to power something, just using a
high impedance meter to read the voltage).
Back EMF [Volts] is proportional to (magnetic field
strength[Webers]) * (total number of wires[no units]) *
(rotational speed[RPM]) / 60 [convert RPM to RevPerSec]
Note: If the power circuit to the motor is opened and a
high input impedance voltmeter is across the motor terminals it
will read the back EMF.
Tried this on an RS-555 motor where the supply was set to 18.0
Volts. With the power applied the DMM reads 18.0 volts and
when the power is disconnected the voltmeter reads about 17.9
Volts and as the motor spins down the voltage drops.
Stall Current
For the Mabuchi RS-545SH:
Nominal spec: 6800 RPM @ 12 Volts, K= 0.01685
The no load current in in the range 0.25 to 0.3 Amp, Torque (no
load) = 0.25A * 0.001765 Volts/RPM =
Voltage
|
Stall
Amps
|
No Load
Amps
|
Rstall
Ohms
|
3
|
1.18
|
0.25
|
2.54
|
4
|
1.60
|
0.26
|
2.50
|
5
|
2.02
|
0.28
|
2.47
|
6
|
2.32
|
0.28
|
2.58
|
7
|
2.78
|
0.29
|
2.51
|
8
|
3.25
|
0.29
|
2.46
|
9
|
3.6
|
0.28
|
2.50
|
10
|
3.7
|
0.29
|
2.70
|
The motor resistance is about 2.5 Ohms including the wires from
the power supply.
Note: A key thing about these is that they can produce a lot of
torque when the shaft is stalled. Internal Combustion
Engines (ICE) need to be running at some speed in order to produce
torque. This is why Diesel Electric Locomotives are so
popular, i.e. they have a lot of torque at zero speed. BUT .
. . a lot of attention needs to be paid to cooling the motor since
overheating can easily burn it out.
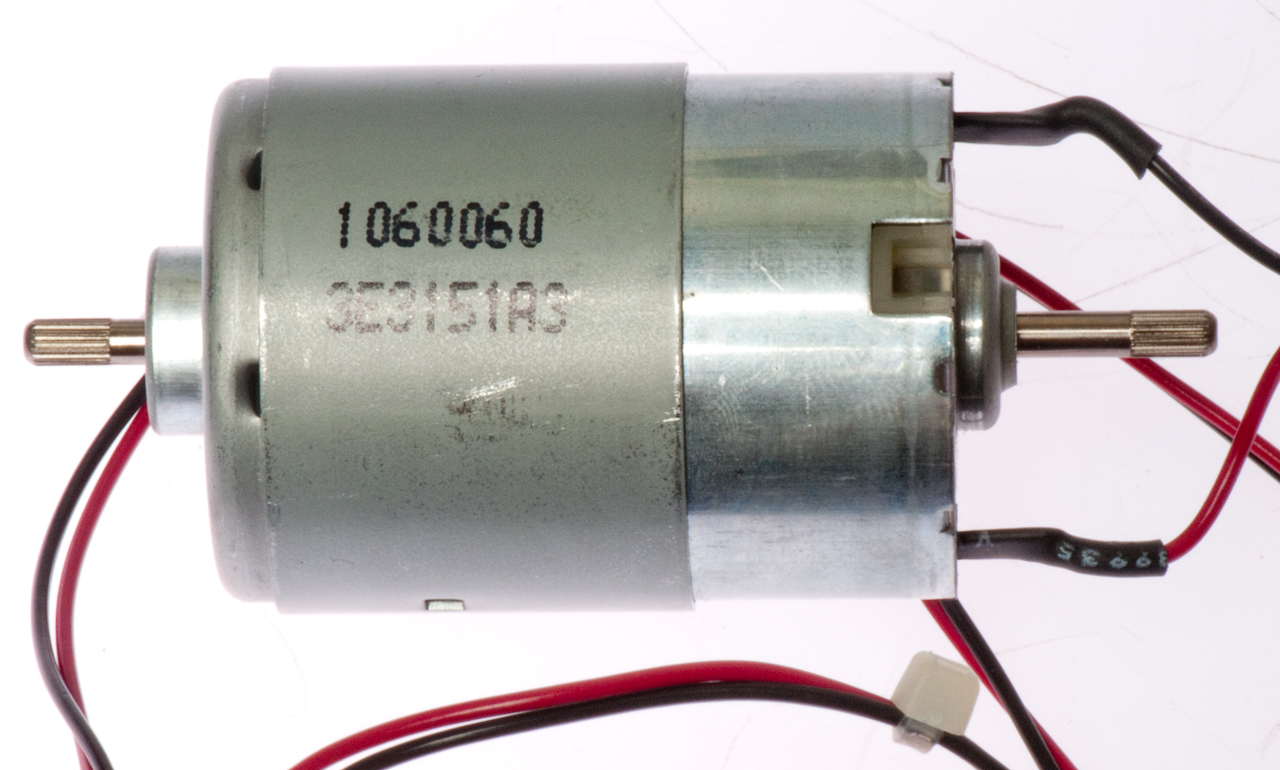
Starting Current
In June 2015 I got some RS-775 type motors that have a 5.0mm
shaft diameter to work with a family of flywheel/pulleys.
When powered by an HP/Agilent/Keysight E3617A power supply (0 to
60 Volts at up to 1 Amp) the motors will not start
spinning. But on power supply, like the HP 6038A that can
supply higher currents the motor spins up.
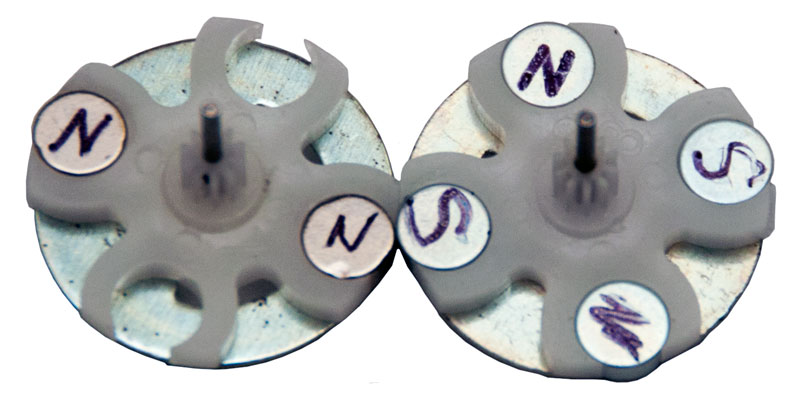
Self Starting
A 2-pole motor may not start when power is applied and will
turn in either direction depending on the direction of the
initial manual spin. Motors with 3 or more poles will self
start and run in the same direction for the same input polarity.
Efficiency
Efficiency is a measure of the power output compared to the
power input.
When a motor is running with no load it has zero efficiency
because there's no useful power out. So the lower the
power consumed when the motor is running at no load the better.
Note: At "no load" there really is a small load because
of bearing friction and wind loss. There are some Youtube
videos where the presenter was proud of the high power consumed
by his motor when running at "no load", that's a big mistake.
May of the YouTube home built DC motors that claim "over unity"
or "zero point energy" are being evaluated on their electrical
input power and electrical output power and the mechanical
output power is never evaluated. One of the presenters
went to some effort to describe how to make a small dynamometer
but never showed it being used on any of his "motors". So,
the so called "motors" are not really motors but rather DC to DC
converters and so are misnamed "motors". Note that
measuring electrical power when the current is either DC or a
sine wave is straight forward, but when it's a more complex
waveform it's difficult to make power measurements. Many
of these "motors" can be seen as works of dynamic art and are
fun to look at when they are running.
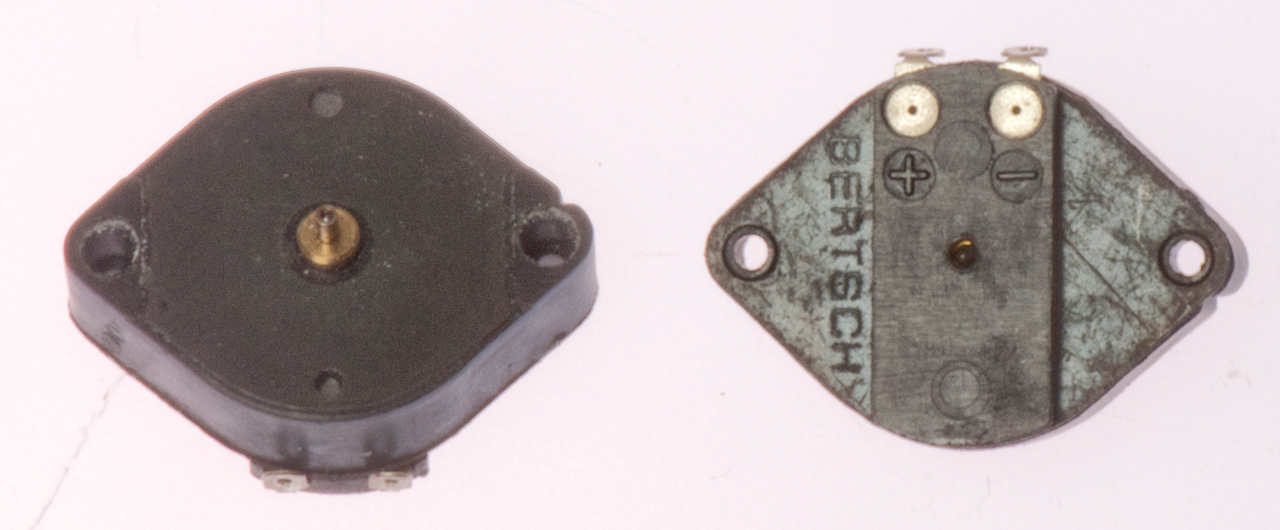
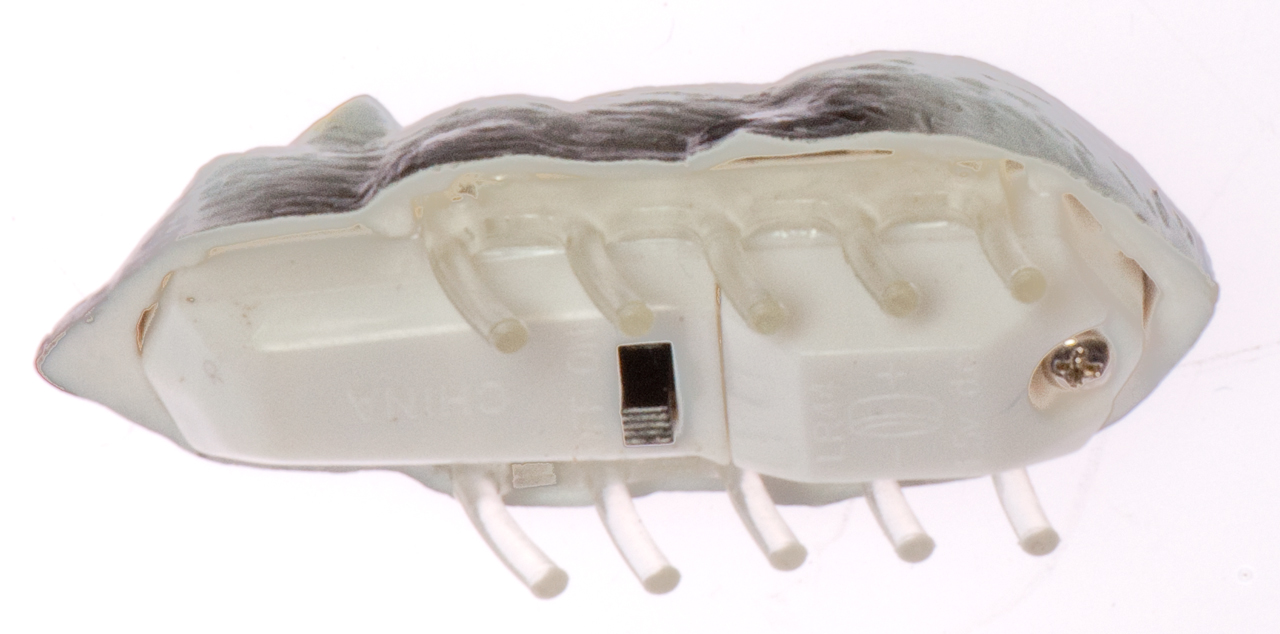
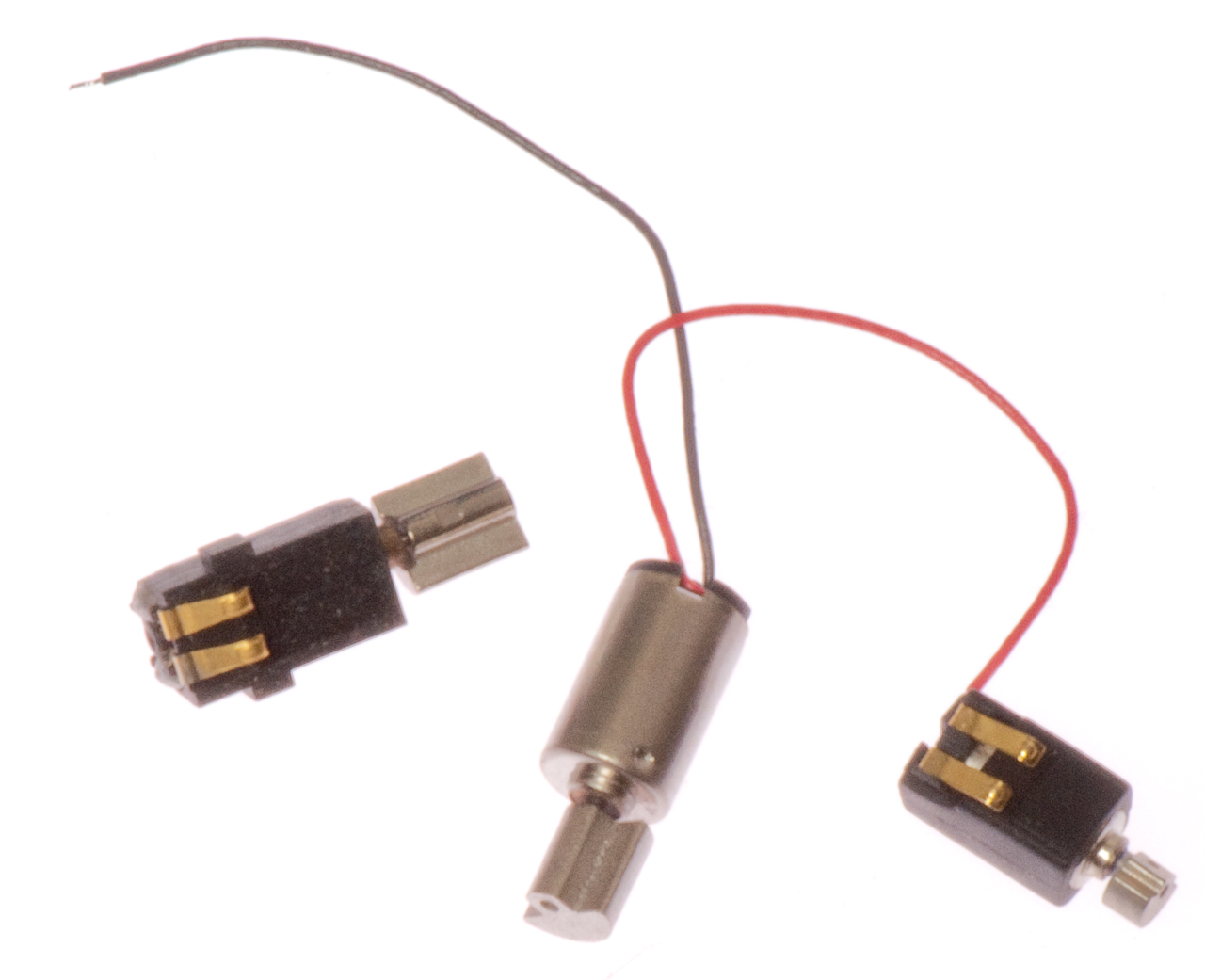
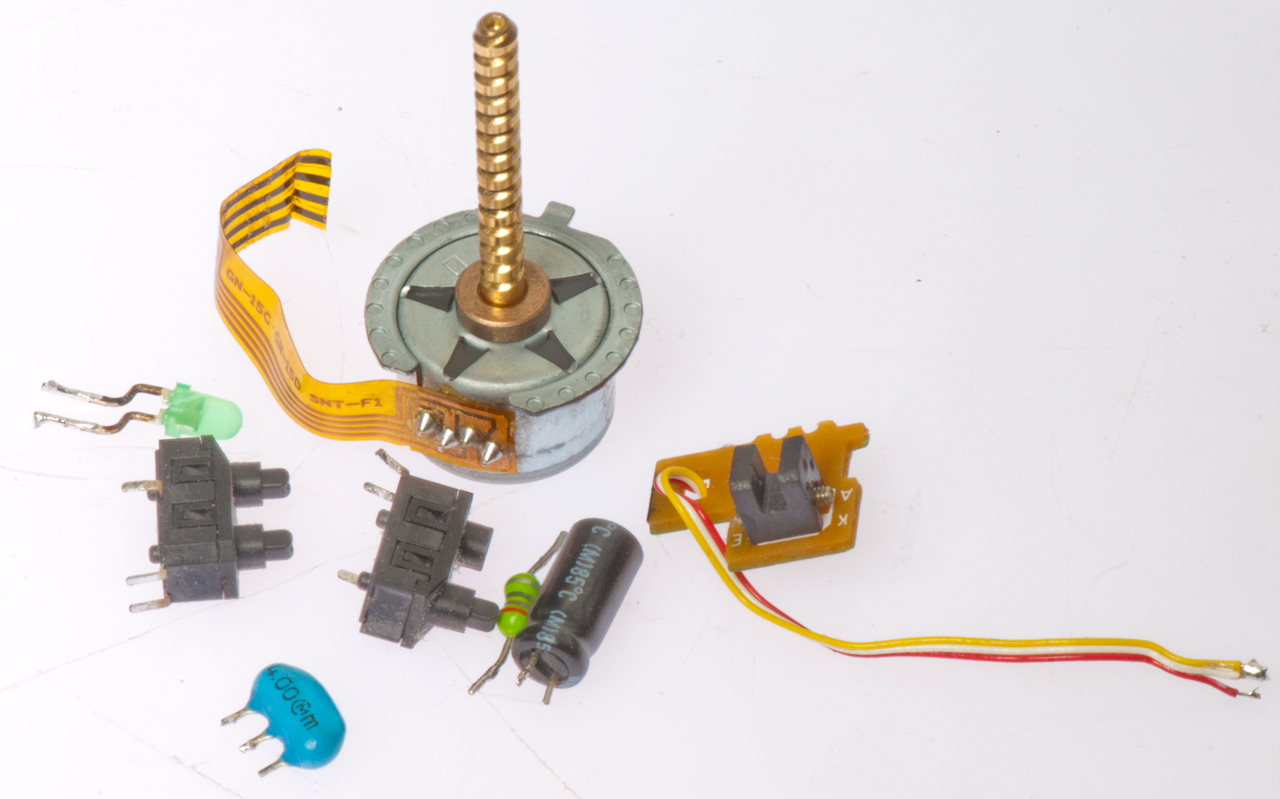
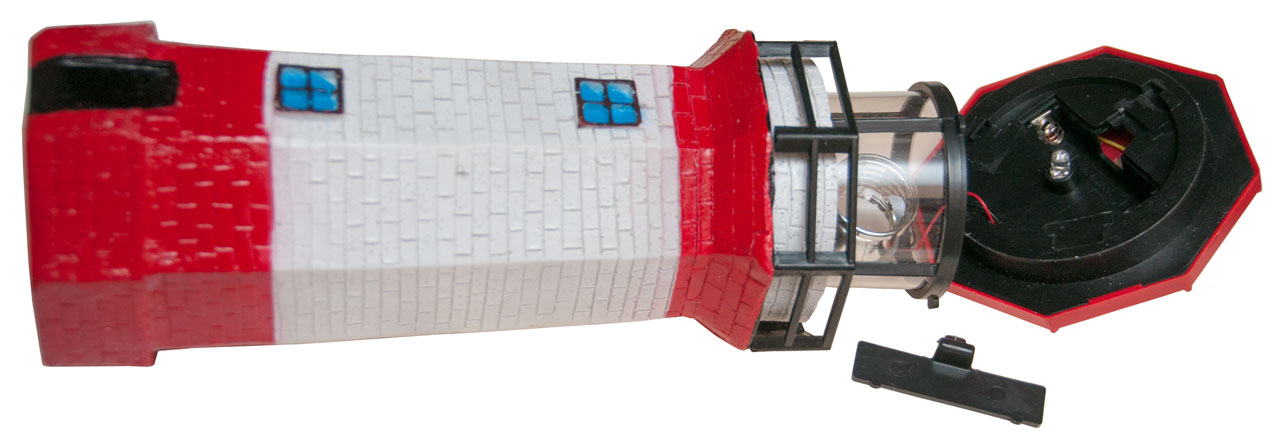
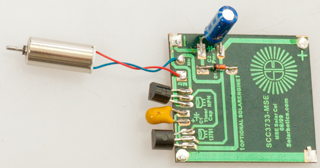
Pager Motor
This Miller Solar Engine (MSE) circuit runs the motor for about
10 seconds. The times vary depending on how bright the
light is.
On a cloudy day it might be six minutes between runs of 6
seconds, and in direct noon sun it might be 11 second runs every
10 seconds.
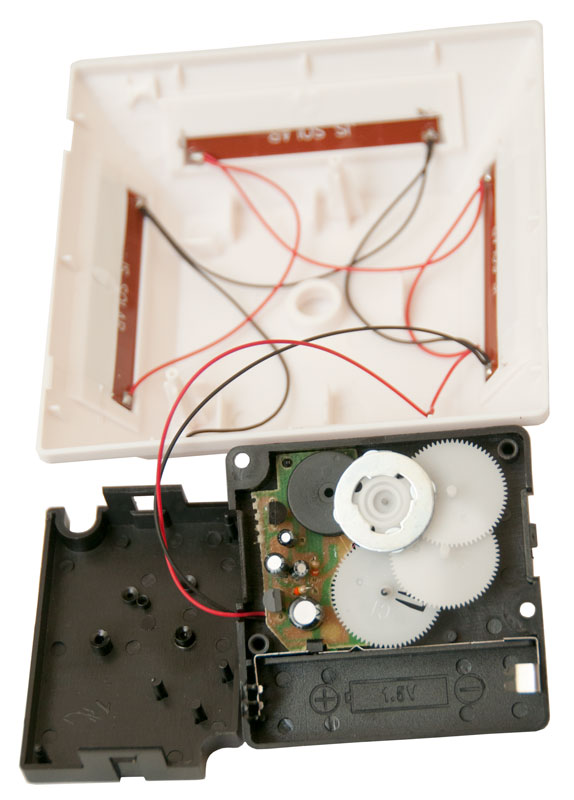
The circuit works by the solar panel (the back of the panel has
the MSE ciruict shown in the photo) charges up a 0.33F super cap
and when the 1371 gets to it's trip voltage a pin is grounded
turning on a transistor that connects the super cap to the
motor. The 1371 has it's own capacitor with isolation
diode so that it will remain on even after the super cap voltage
goes below the trip point.
I expect with some glue circuitry a number of these can be
connected in series to provide higher voltages and larger value
super caps can be used.
Maxon A-max
26mm dix x 57mm overall
Motor body length: 44.65mm
2.97mm dia shaft with flat x 10.73mm long
Six threaded holes on shaft end, size & location TBD.
Motor starts to turn at 0.07V and draws 12ma.
V
|
ma
|
RPM
|
0.07
|
12
|
|
1.0
|
19
|
|
1.5
|
22
|
|
3.0
|
32
|
|

|
6x<M3
17.4 dia?
|
|
Maxon makes some very high end motors with much better
specifications than you get from a pager motor. Instead of
the under a dollar that a new pager motor costs, these go for
about $100 each new and are not often on the surplus
market. Supposed to have very low no load power and be
very efficient.
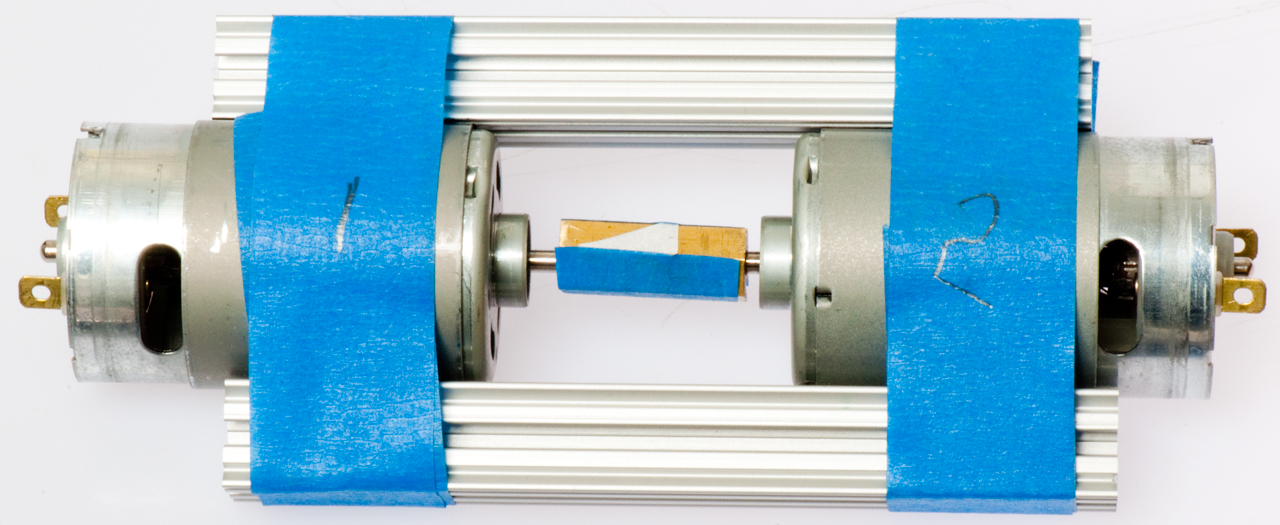
Mabuchi RS-550PC permenant magnet DC carbon
brush motor & DT2234A+ digital Optical tachometer
Aluminum foil and painters blue tape wrapped around gear
for tachometer.

|
Two RS-550PC Motors
coupled for measurements
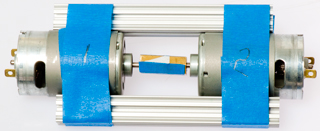
Blue tape on coupling to stop reflections, triangle is
reflective strip.
|
Dual motor test done using:
HP 6038A 0 - 60 V 0 - 10
A Power Supply
Two RS-550PC Motors coupled so No. 1 is motor and No. 2 is
generator
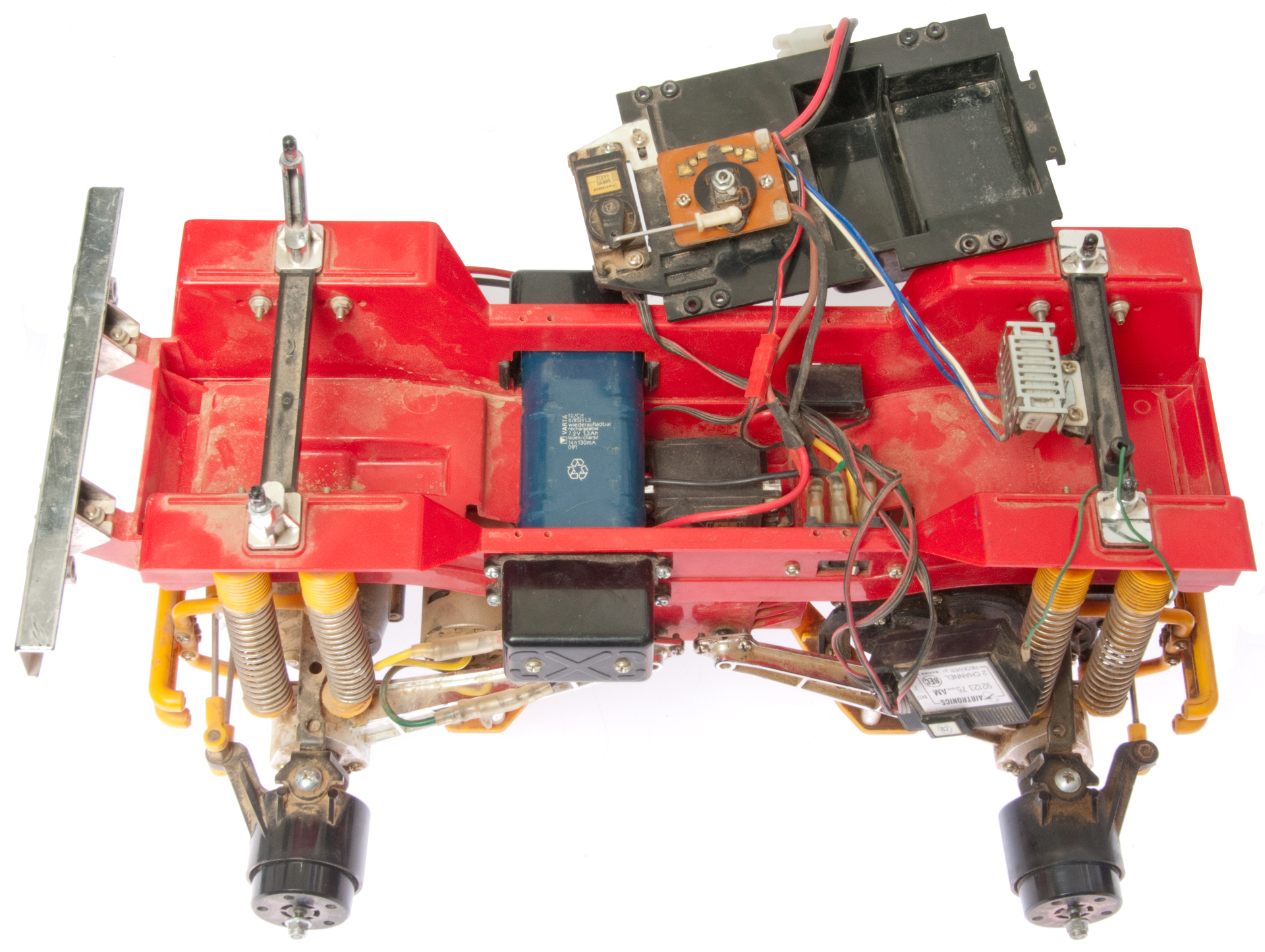
High Power Load from Tamaya
Grasshopper RC car Mechanical Speed Control
Optical Digital Tachometer DT2234A+
|
|
| Volts In |
Amps In |
Watts In |
RPM |
Volts Out |
Amps Out |
Watts Out |
R In |
R Load |
| 3 |
0.64 |
1.9 |
869 |
1.96 |
0 |
|
4.7 |
|
| 1.25 |
3.8 |
476 |
0.22 |
0.037 |
0.008 |
2.4 |
5.8 |
| 4 |
0.74 |
3.0 |
1295 |
2.96 |
0 |
|
5.4 |
|
| 1.54 |
6.2 |
721 |
0.32 |
0.048 |
0.015 |
2.6 |
6.6 |
| 5 |
0.73 |
3.7 |
1661 |
3.75 |
0 |
|
6.8 |
|
| 1.80 |
9.0 |
895 |
0.42 |
0.043 |
0.018 |
2.8 |
9.7 |
| 6 |
0.77 |
4.6 |
2075 |
4.70 |
0 |
|
7.8 |
|
| 2.09 |
12.5 |
1112 |
0.61 |
0.042 |
0.025 |
2.9 |
14.4 |
| 7 |
0.61 |
4.3 |
2589 |
5.86 |
0 |
|
11.5 |
|
| 2.33 |
16.3 |
1354 |
0.64 |
0.042 |
0.027 |
3.0 |
15.2 |
| 8 |
0.43 |
3.4 |
3014 |
6.80 |
0 |
|
18.6 |
|
| 2.38 |
19.0 |
1609 |
0.71 |
0.055 |
0.039 |
3.4 |
12.9 |
| 9 |
0.44 |
4.0 |
3516 |
7.92 |
0 |
|
20.5 |
|
| 2.64 |
23.8 |
1946 |
0.85 |
0.062 |
0.053 |
3.4 |
13.7 |
| 10 |
0.44 |
4.4 |
4086 |
9.06 |
0 |
|
22.7 |
|
| 2.85 |
28.5 |
2202 |
0.90 |
0.074 |
0.067 |
3.5 |
12.2 |
| 11 |
0.47 |
5.2 |
4468 |
10.06 |
0 |
|
23.4 |
|
| 3.15 |
34.7 |
2432 |
1.01 |
0.06 |
0.061 |
3.5 |
16.8 |
| 12 |
0.56 |
6.8 |
4954 |
11.05 |
0 |
|
21.3 |
|
| 3.42 |
41.0 |
2652 |
1.08 |
0.084 |
0.091 |
3.5 |
12.9 |
RPM = 390.51 * Vin with motor #2 as open circuit load.

This is a carbon brush permanent magnet DC motor (Data
sheet).
Some specs:
Operating Voltage 6.0 - 9.6, Nominal 7.2 VDC
No Load Speed 15,300 RPM @ 1.4 Amps
At Max Efficiency: 13, 540 RPM, 10.8 Amp 41.7 mN*m, 425 g*cm,
59.1 Watts
Stall Torque 363 mN*m, 3700 g*cm @ 83 Amp
25mm diameter x 75mm overall length
3.17mm OD x 8.7mm shaft.
2x M3 mth holes 24.3mm apart?
Mabuchi RS-555PH-3255
Beams & Construction Supplies
T-Slot beams are handy for making stuff.
Comparison of the starter Kits.
Brand
|
Weight
|
Size
|
Longest Beam
|
End
Section
|
MicroRAX
|
2# (includes extras)
|
2" dia x 3' tube |
35-3/8" (898.5mm) |
|
MakerBeam
|
3 # 4 oz
|
11.5" x 9" x 1" box |
11.8" (300mm)
|
|
OpenBeam
|
2#
|
9.5" x 7" x 2" |
6" (152mm)
|
|
MicorRAX is the lightest weight (strength), OpenBeam is
stronger and MakerBeam is strongest of these three (intended
for making 3D printers?)
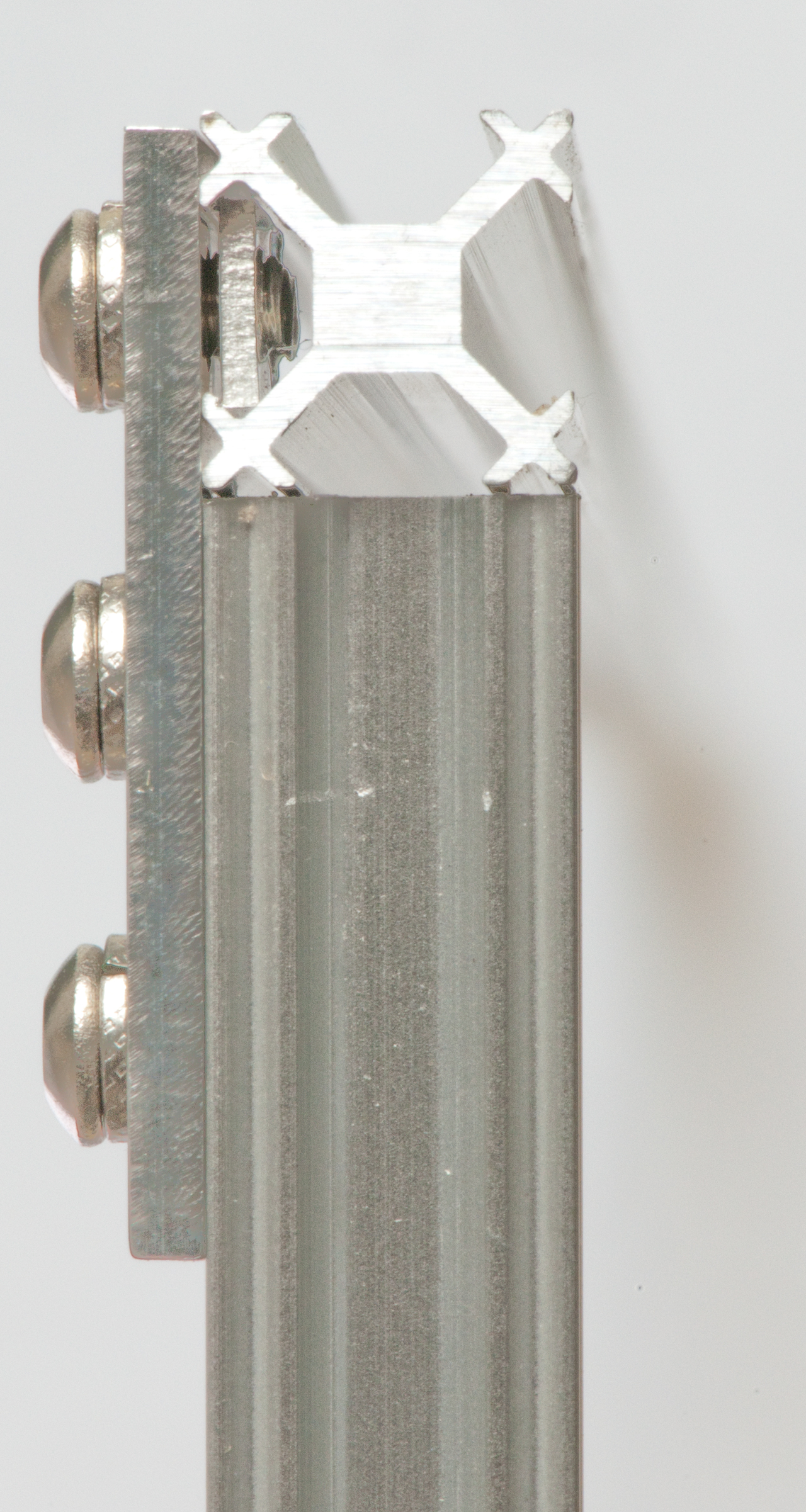
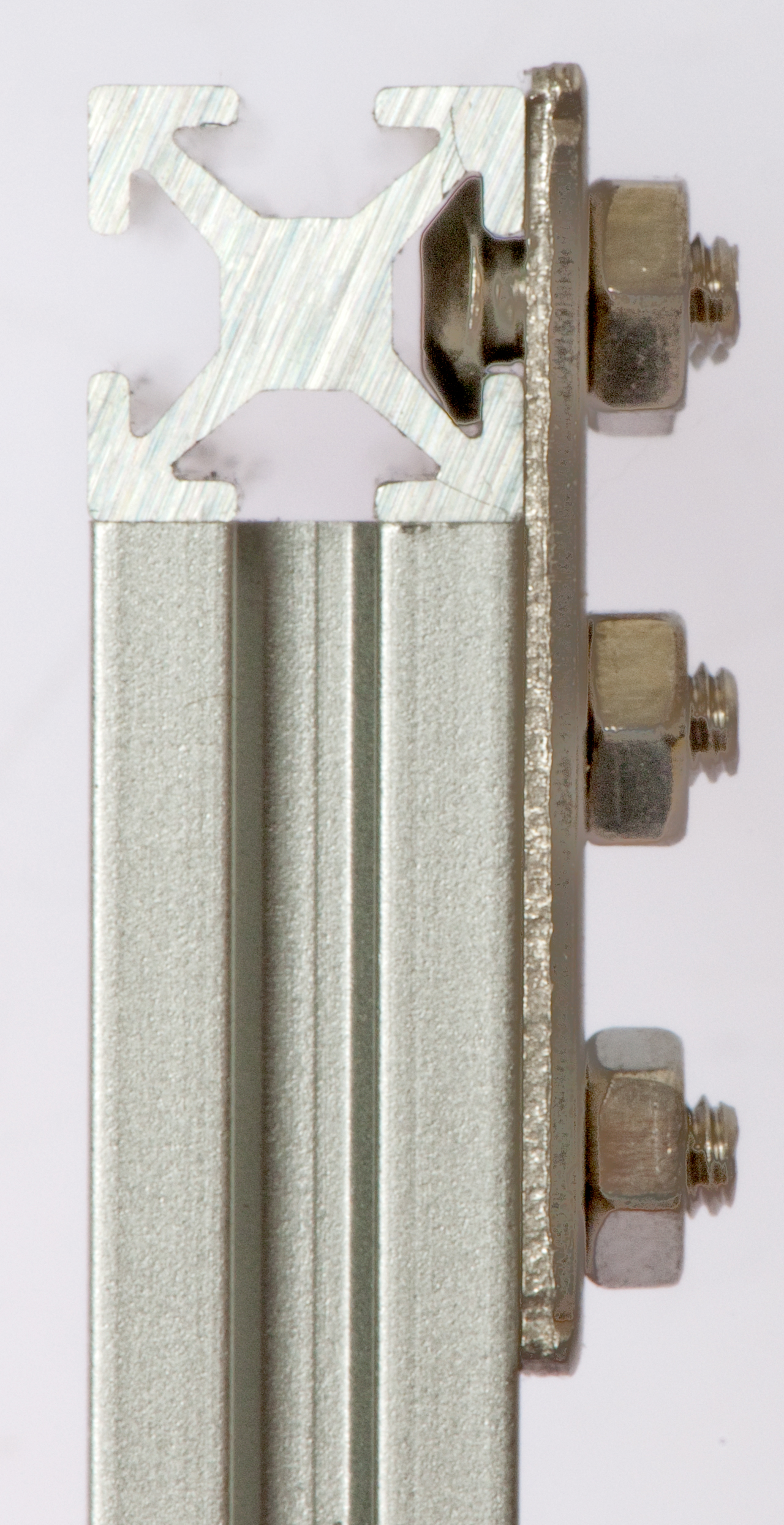
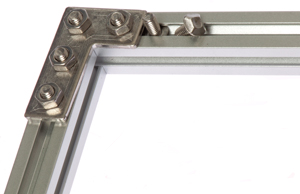
MicroRAX
MicroRAX - 10x10mm beam,
uses M3 fittings but with special narrow nuts (Starter Kit
received 11 July 2013)
The 3 beams that come as part of the starter kit are 35-3/8"
(898.5mm) long.
I think the Harbor Freight Mini Cut Off
Saw will make cutting the beam easy.
2" dia x 3' tube
2 pounds

|
Inside tube

|
Starter Kit + some extras

|
|
|
Right Angle bracket
Uses standard M3 screws & lock washers.
Need 2mm hex bit (not the 1.5mm bit that was also
shipped)

|
|
Starter Kit (3 beams not shown) $80

|
|
|
Nut plates instead of standard nuts to
fit into the small T-slot.
 |
|
Extra Parts in addition to the starter
kit $40
Tri-Corner
PCB Standoff Kit
Mounting Bracket for 1/4"
Joining Plate Truss Style
Joining Plate Corner Style

|
|
|
|
|
|
|
|
MakerBeam
MakerBeam.EU - is a 10 x
10mm beam, uses M3 fittings - from Europe (Starter Kit on order)
Like:
When joining two beams to make a right angle corner they fit
well. Haven't checked the angle.
Metal brackets.
You can attach nuts to screws and brackets then slide into beam.
Good variety of brackets.
Dislike:
Using special square headed M3 screws, are they readily
available?
11.5" x 9" x 1" box 3 lbs 4 oz

|
Contents of Starter Kit

|
|
Corner Joint showing special square
headed M3 screw
|
End of Beam with screw

|
|
OpenBeam
OpenBeamUSA - is a
15x15mm beam, uses M3 fittings - hard to get (Received 11 July
2013) $80
comes with:
2 packages of 8 plastic L Brackets
1 packages of 8 plastic T Brackets
1 bundle of 12 each 6" Beams
A bag of screws
A bag of nuts
A 1mm ball end hex wrench
Like:
Uses what appear to be standard M3 hex head screws and nuts.
The corners of the beam are designed to be the rails for a
linear motion system.
You can attach nuts to screws and brackets then slide into beam.
Dislike:
Plastic brackets with sloppy holes.
Burs where beam has been cut.
9.5" x 7" x 2"
2 pound box

|

|

|

|
80 20 Inc - offers 20x20mm
T-slot extrusions and larger sizes, also inch sizes
T-Slots - offers 2x2" or
50x50mm and larger extrusions
Parco Inc - 10x10mm
- Joining
Plates - fractional
fasteners -
MiniTec - they have
an 11x19mm (1 slot) & 19x19 (2 slots), not the slot on each
face like the above products.
MakerSlide
- for linear motion (related to Vslot and/or V rail?)
Faztek - useless web pages
Tamiya Pulley Unit Set
TAM70121 - (Kit on order)
Tamiya Pulley (L) Set
TAM70141 - (Kit on order)
Tamiya Pulley (S) Set
TAM70140 - (Kit on order)
Phidgets
T-Slot
Primer - very innovative ways of making connections,
much more so than the above.
20,
30
& 40mm
beams, but expensive
T-Slotted in sizes: 1", 1.5", 1x2", 20mm, 25mm, 30mm, 40mm,
45mm - many versions including curved to build up a circle.
Quick Frame (hollow square tubing): 1" + square tubing with
fins in various places ("P" & "A" tube) plus flanges.
Ready Tube (hollow square tubing w/drilled holes): 1", 1.5"
(use with Standard Tube Insert)
a ton of fasteners
- Panels
Doors - Floor
-Frame - Structrual
Shapes - Add-On
Components - Finishing
Trim - Tools - Kits (EF101
- $254.25) - Basics -
EF101
Qty
|
Size
|
Desc.
|
p/n
|
2
|
1x1x12"
|
T-Slot
|
1010
|
2
|
1x1x8"
|
T-Slot |
"
|
6
|
1x1x6"
|
T-Slot |
"
|
4
|
1x1x4"
|
T-Slot |
"
|
2
|
1x2x6"
|
T-Slot |
|
1
|
1x2x2
|
T-Slot |
1020
|
1
|
6.5x2.5
|
Panel
|
|
1
|
8.5x6.5
|
Panel
|
|
1
|
10.5x8.5
|
Panel
|
|
4
|
|
Roller Wheel
|
|
2
|
|
Drop-In T-nut
|
|
1
|
|
Brake Assy
|
|
2
|
|
But Fastener
|
|
1
|
90 deg |
Pivot
|
|
6
|
1/4" |
washer
|
|
10
|
|
1/4-20 Hex Nut
|
|
4
|
|
Lift-Off Hinge |
|
6
|
|
End Caps
|
|
4
|
|
Double Slide-in Econ
T-Nuts
|
|
16
|
|
Single Slide-In
Economy T-Nut |
|
1
|
|
3-hole corner bracket
|
|
4
|
|
Panel Mount brackets
|
|
4
|
|
2-hole flat plate
|
|
4
|
|
2-hole corner bracket
|
|
8
|
¼-20 x ¾” |
FBHSCS |
|
16
|
¼-20 x ½” |
BHSCS |
|
8
|
¼-20 x 3/8” |
BHSCS |
|
8
|
|
Anchor Fastener |
|
10
|
|
End Fastener |
|
1
|
7/16 |
Box End Wrench |
|
1
|
5/32 |
Hex Driver |
|
1
|
3/16 |
Hex Driver |
|
1
|
|
Assembly Guide |
|
1
|
|
Storage Case |
|
YouTube: Tech
Ingredients: @9:26
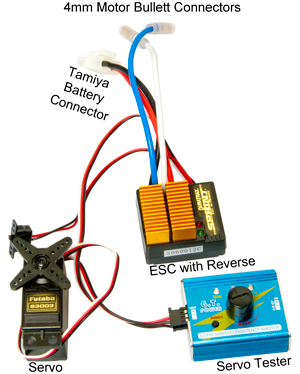
80/20 Products -
Electronic Speed Controls (ESC) &
Related Controls
Very small DC motors can be controlled using
transistors but larger motors run with much higher currents and
need high current H bridges.
The input to the ESC is typically the pulse width modulated
output from an Remote Control (RC) receiver, but some allow for
other input formats like serial bytes or packets.
Dimension
Engineering - Sabertooth
dual 25A motor driver - Kangaroo
X2 Motion Controller -
Pro-Bot
-BeeBot
- Logo
language bots
Duratrax - DTXM1200
Electronic Speed Controller (on order 11 July 2013)
G.T.Power RC Servo and ESC Tester
(AsiaTees Retail store selling G.T.
Power equipment) (on order 11 July 2013)
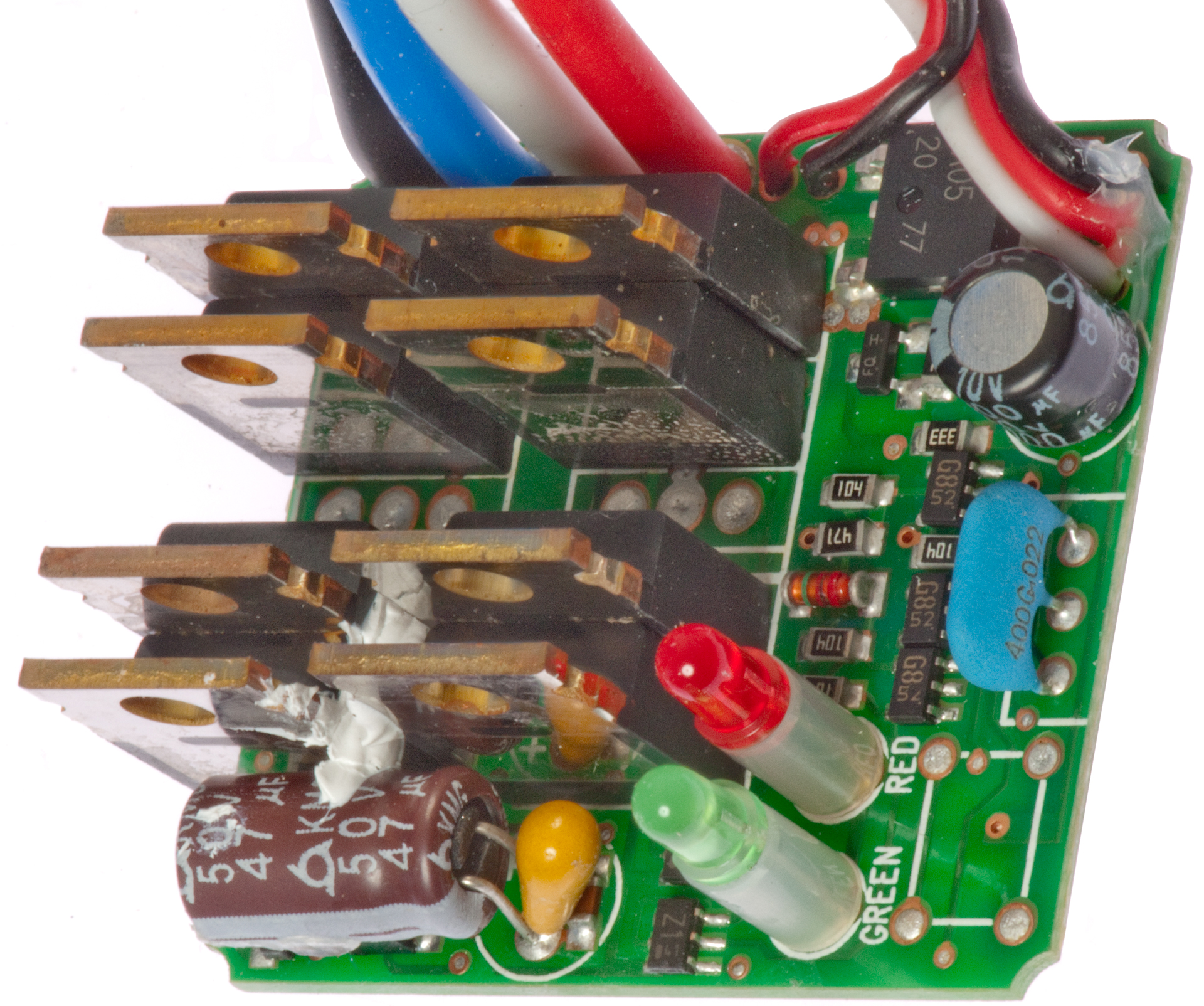
|
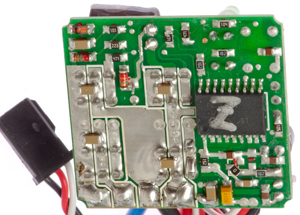
Duratrax Sprint 1 ESC w/Reverse opened
Top

Blue 4 MHz resonator at right for PIC, rectangular hole
pattern for switch? at lower right
IRFZ34N
HEXFET: 40 milliOhms, 29 Amps (4ea at top, left 2 in
parallel, right 2 in parallel)
IRL3103
HSXFET: 12 milliOhms, 64Amps (4ea at bottom, left 2 in
parallel, right 2 in parallel)
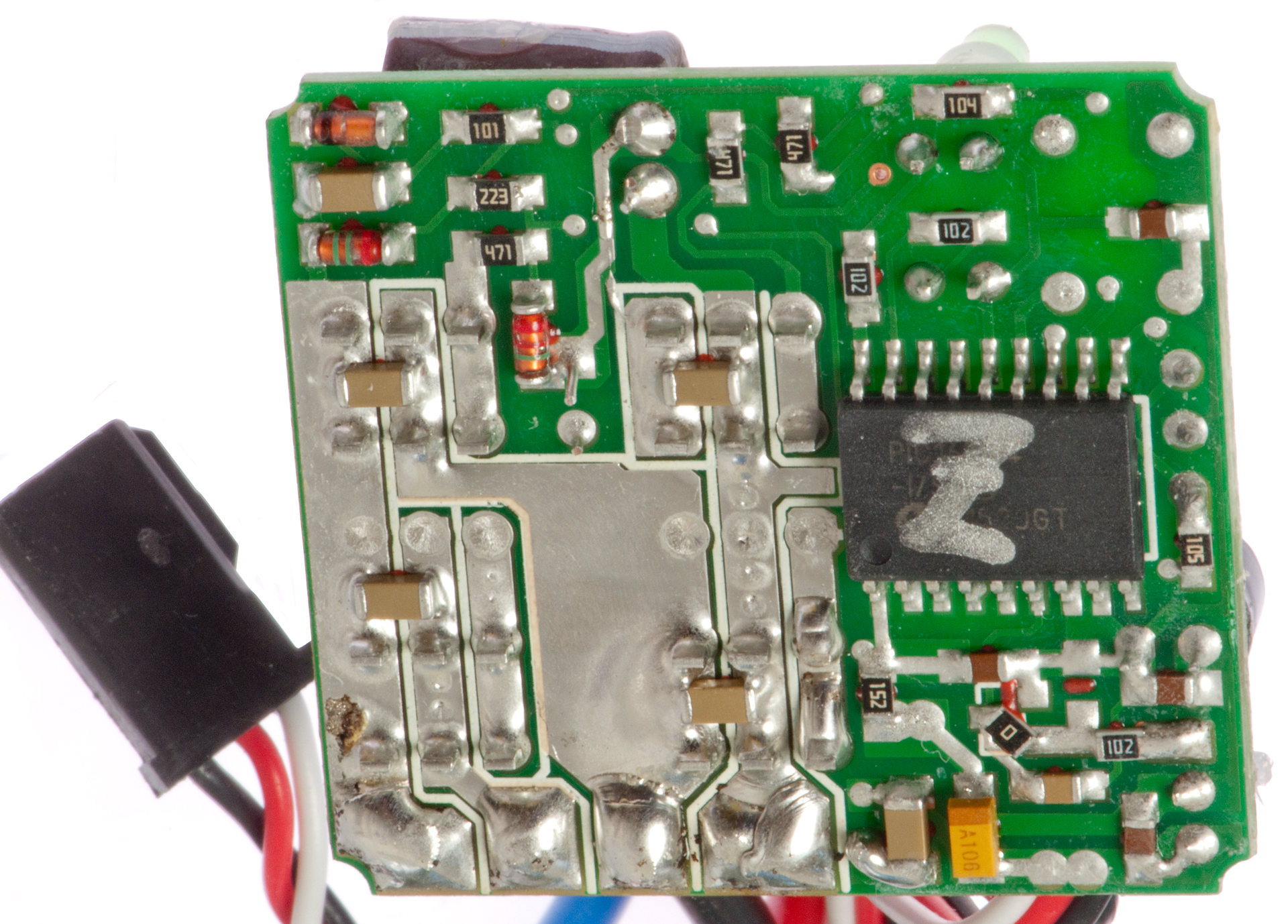
|
Duratrax Sprint 1 ESC w/Reverse opened
Bottom
Wire connections at bottom left to right:
Red Batt-, Blue Motor, White Motor (center big
trace), Black Batt-, red/black On/Off sw (BA05
regulator), blk/red/wht servo input
18-pin PIC micro controller
|
Video of the above setup
|
The tester has three modes:
1.Manual: turning the knob moves the servo and changes
the motor speed from full reverse - stop - full forward.
2.Neutral: the servo is in the center position and the
motor is stopped.
3.Sweep: the servo moves back and forth and the motor
cycles between full reverse, stop, full forward, stop,
etc.
The Electronic Speed Control (ESC) has a 5 VDC output on
it's servo cable that powers the tester, so no
additional power supply is needed.
That same method probably will power a RC receiver with
5 VDC derived from the 7.2 VDC main battery.
There is also an On/Off switch attached to the ESC which
would also power down the receiver.
In the early days of RC instead of the ESC they used a
high power wire wound pot driven by a servo.
|
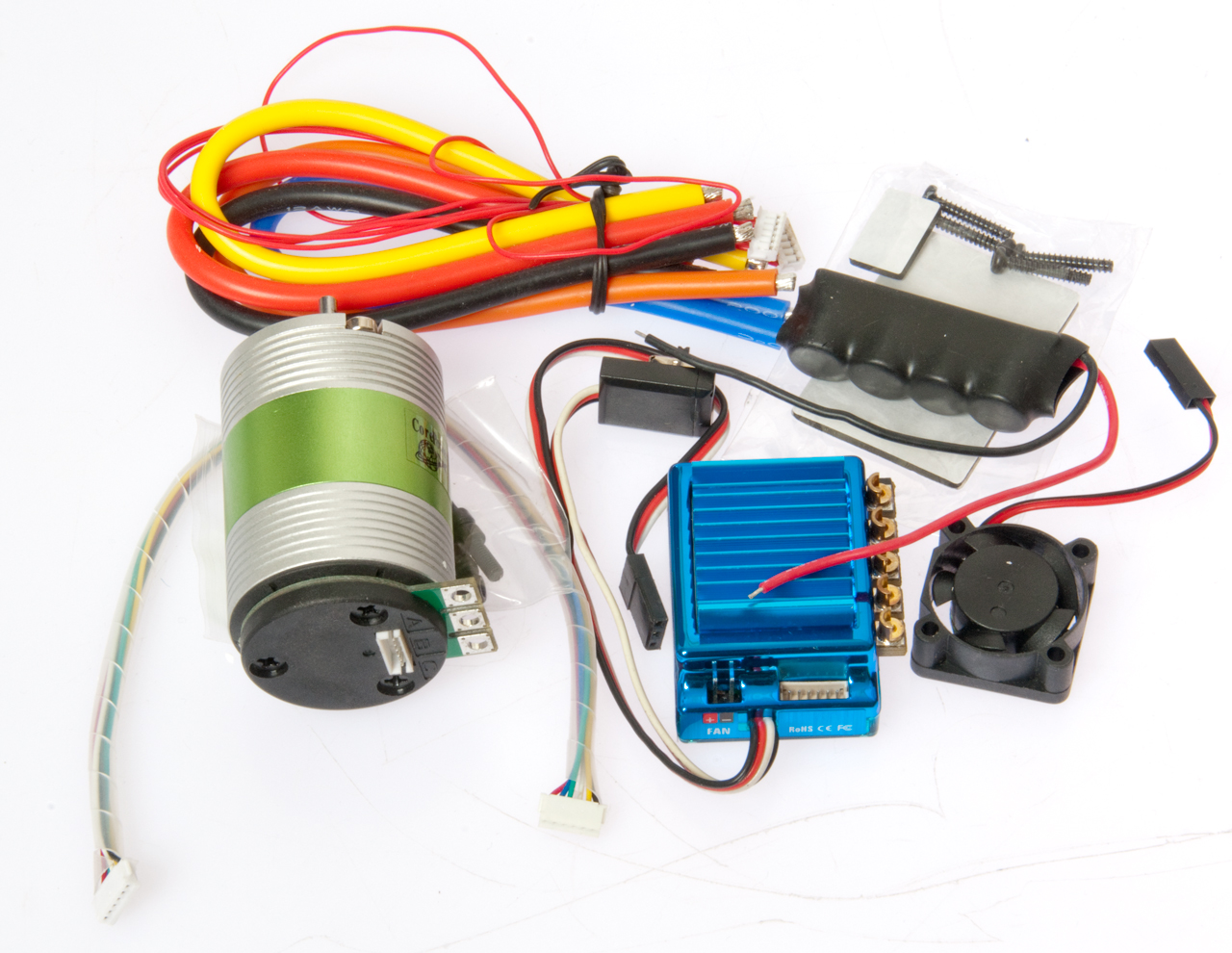
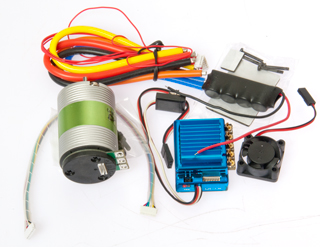
540-13.5T 3150 Kv Brushless DC Motor
& HW 120A Sensored ESC + misc supplies
The black stick with red & black wires is a
capacitor too big to fit into the ESC.
|
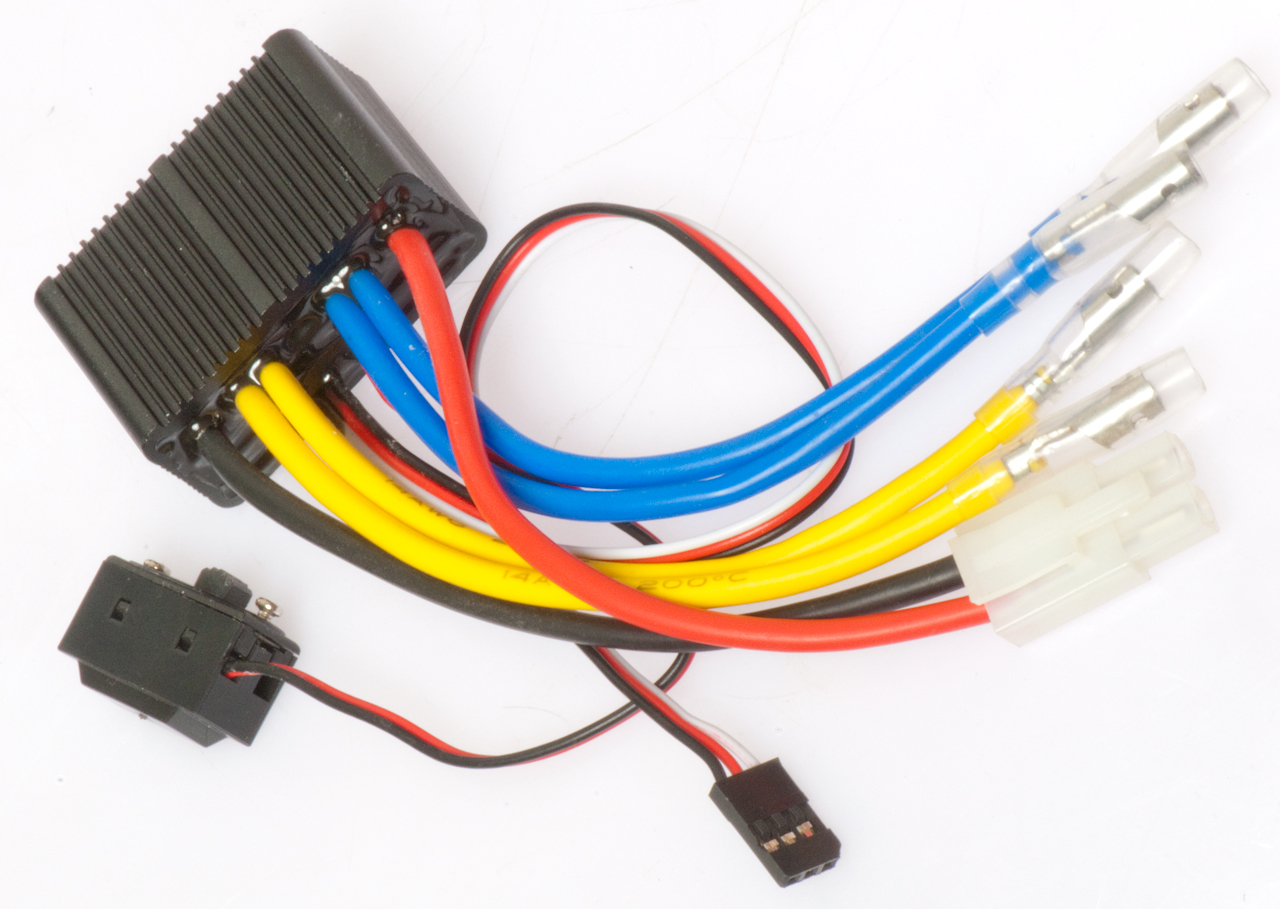
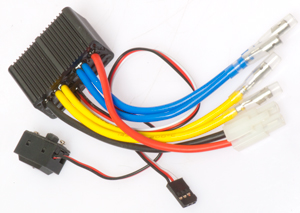
Dual Motor ESC for Tamiya
Bullhead Truck
|
Chassis
Lynxmotion - Aluminum 4WD1 Rover Kit
Arduino
Robot - Maker
Shed -
Torssen
Robotics - Arms & Legs
Lego
Lego has provisions for adding DC PM Motors and this
includes shafts, gears, etc.
This was later upgraded to include controllers and sensors.
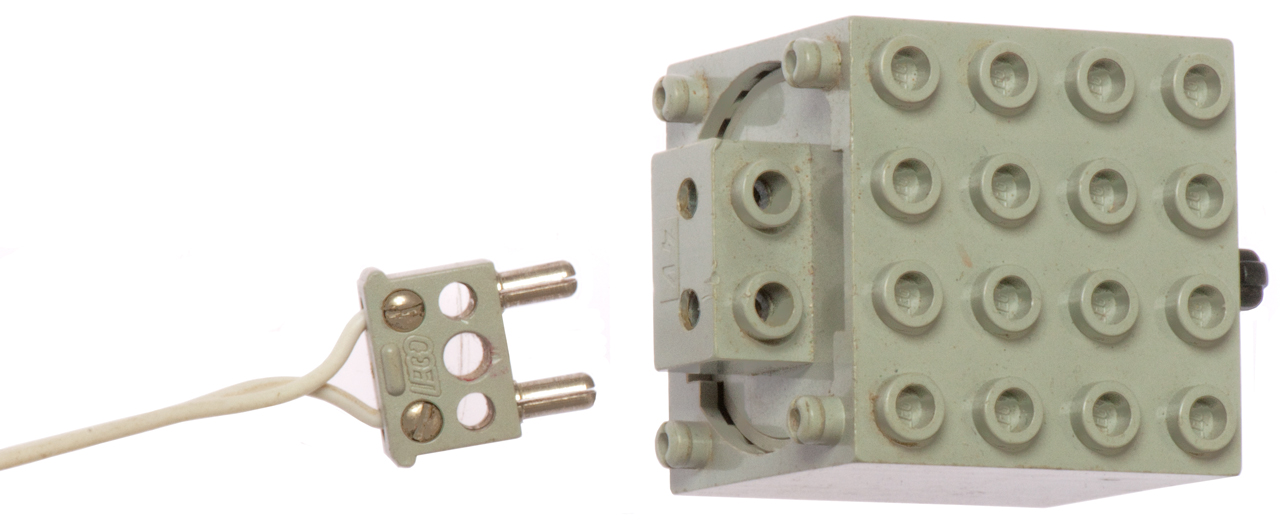
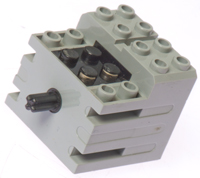
Before Controllers there were Motors
Long before controllers there were many electric motors.
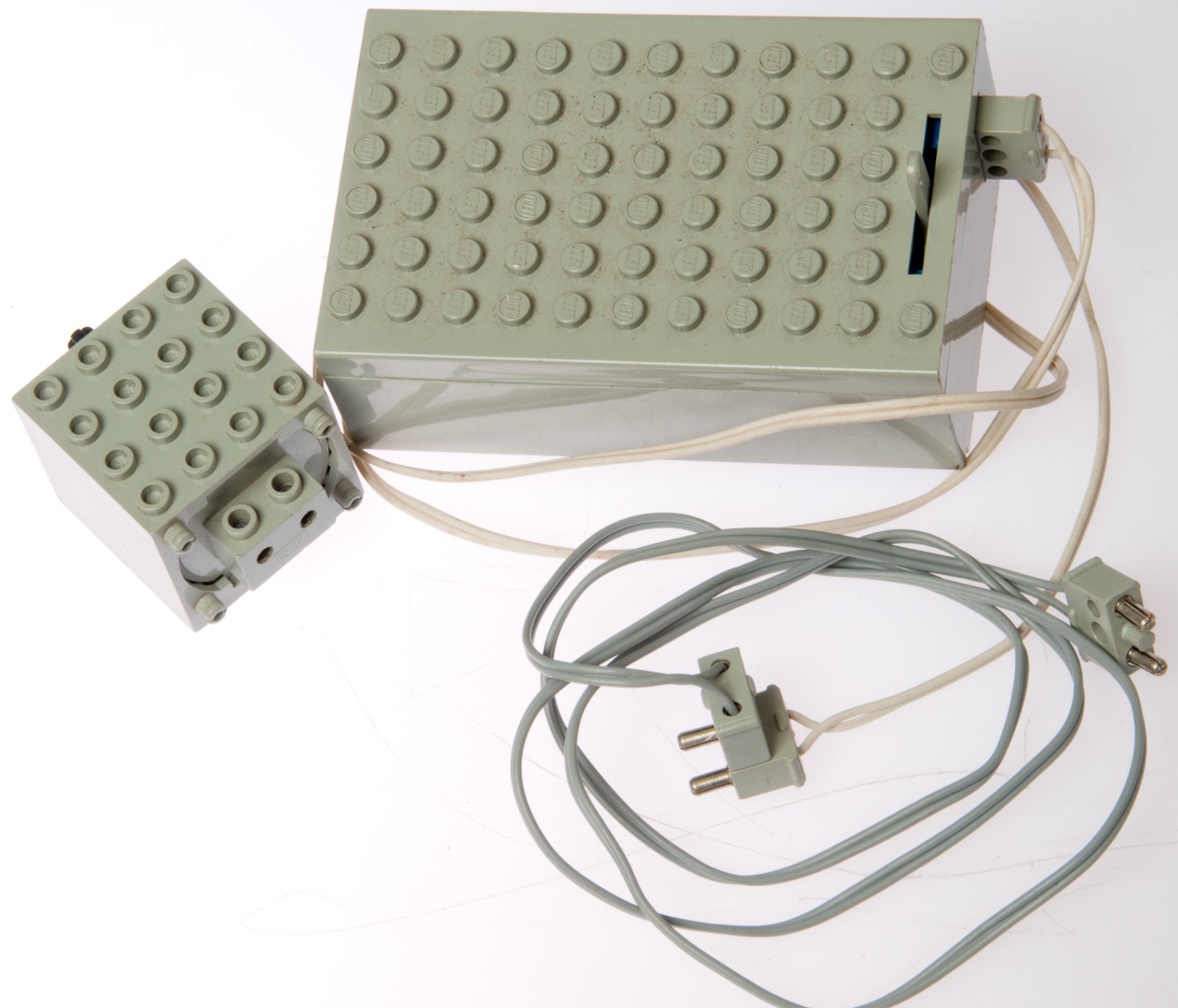
First Generation 3-C Cell Battery Box
& Motors
(connection cables missing)
Battery box accepts 2 or 3 prong electrical plug.
Battery Box may be x468 |
2-prong electrical plug connects to
battery box
and this motor. 8055 motor, different battery box
(the 8055 was a long 3 AA box).

Maybe 6216m
motor |
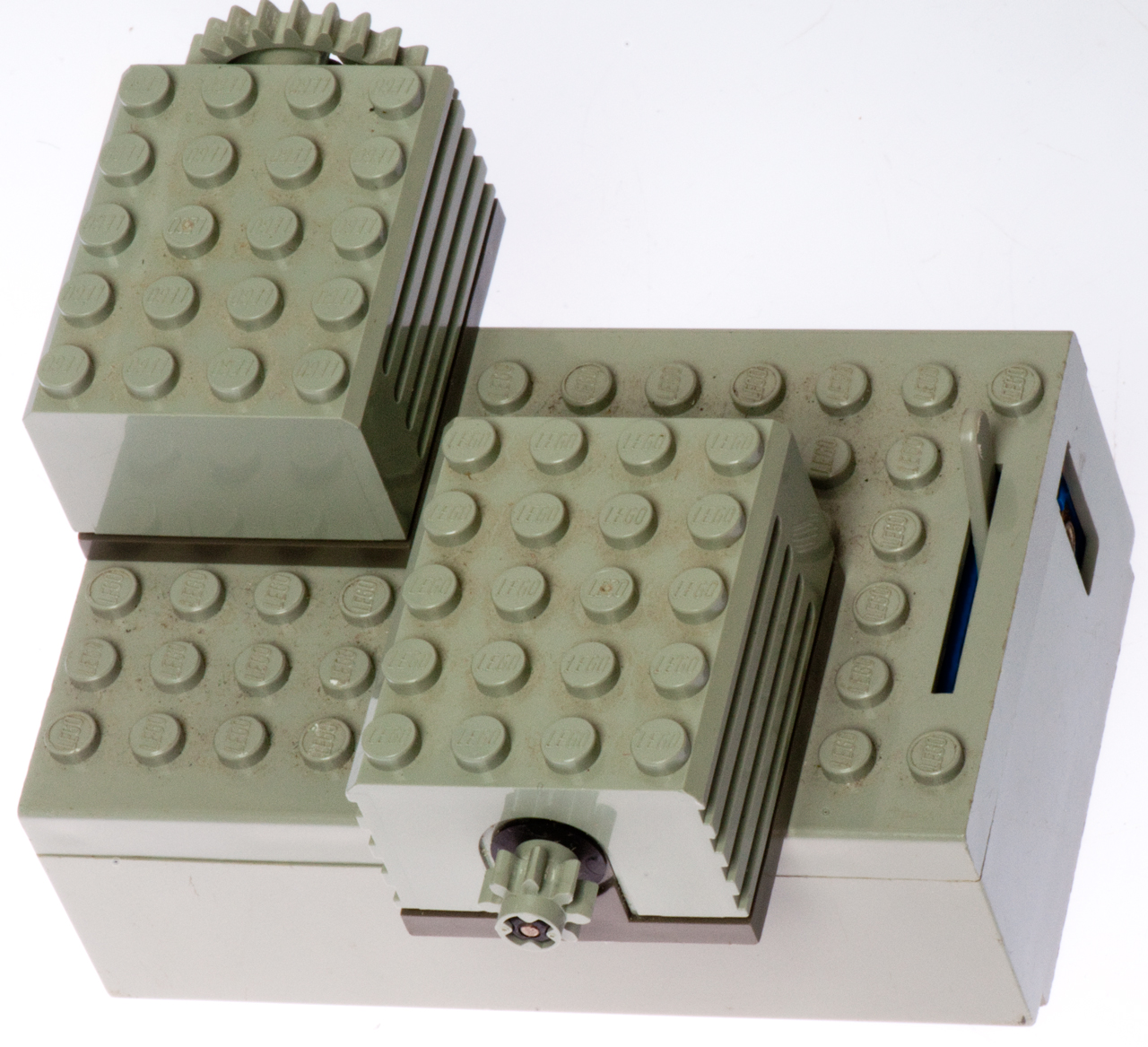
These motors have metal strips on bottom
and
do NOT accept either 2 or 3 prong plugs.
 |
Note 3-hole plug and socket. 4.5
Volt system.

|
Note: 2-prong plug and socket, will also
fit 3-hole socket.
 |
|
|
|
|
RCX
This was the first controller and used an 8 bit
microcontroller.
First LEGO Brick controller

MINDSTORMS®
SDK2.5
Official Lego
Mindstorms site no longer has RCX stuff
|
6 AA cells: 9 Volts

|
IR Tower used as link between computer
COM port and the brick

|
Sensor

|
This might be either 71427 or
43362? |
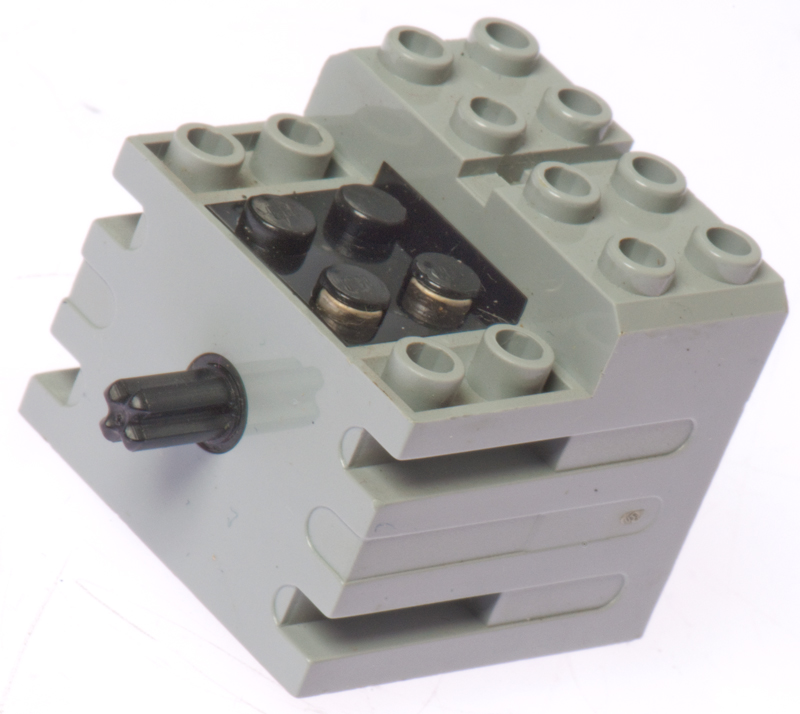
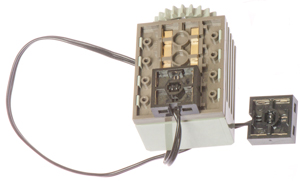
Lego brick with electrical connections,
uses bricks as electrical connection, not prongs.
The black LEGO electrical 2x2 blocks are for
RCX motors. (Wiki)
may be the 2838c01
9 Volt system
 |
|
|
|
NXT
This is the next upgrade from the RCX controllers. A more
powerful uC and improved motors, sensors, etc.
The LEGO NXT series uses a (non standard)
6P6C modular connector. (Wiki)
The NXT mechanical system is different than the classic Lego
bumps.
The NXT motors are called "servo motors" because they contain a
sensor.
This is really a "sensored" motor in the parlance of the RC
world, whether it be a burshed or brushless motor.
NXT
schematics
Deriving power
from NXT® motor port A by Philo
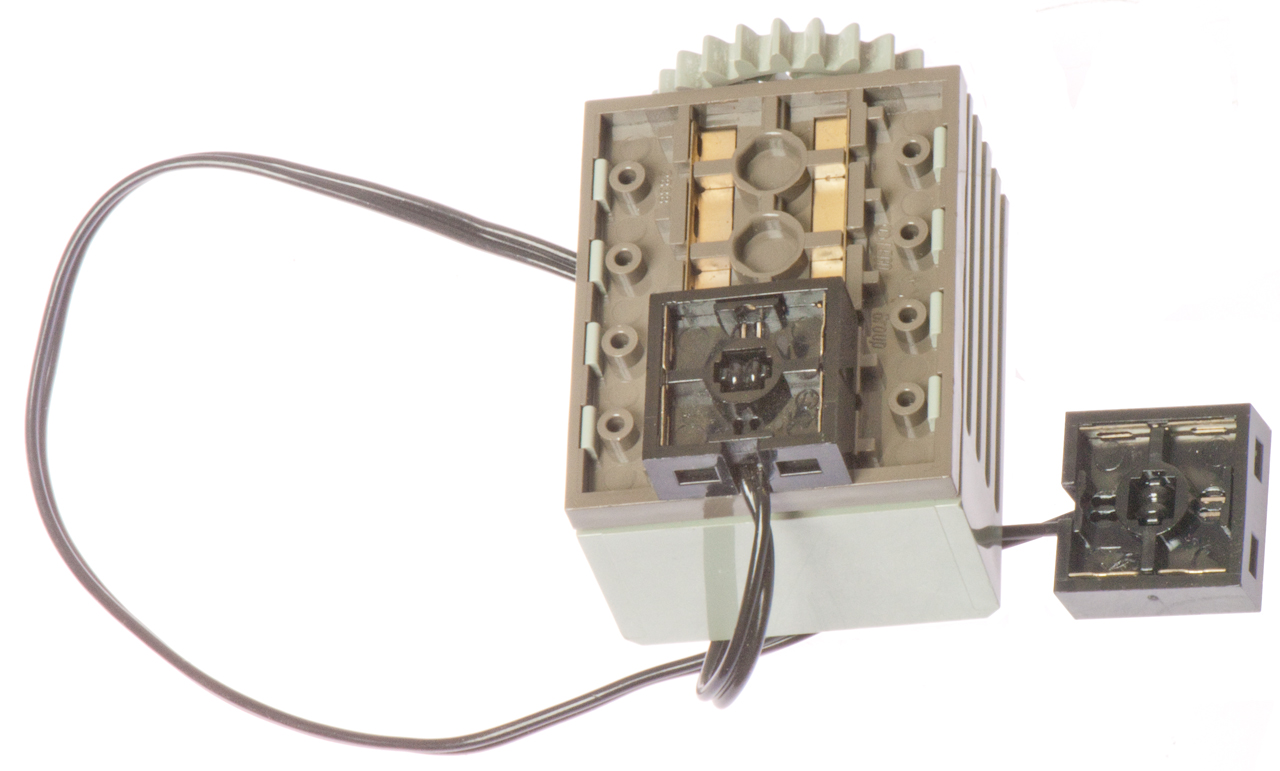
NXT "servo Motor" 53787
This is what the RC community would call a brushed
sensored gear head motor.
It contains two stages of planetary gears.

The top and bottom three hole groups are on the standard
8mm
Lego bump pitch. The "X" hole in the red motor
output is
standard Lego. The four holes on the red motor
output are NXT.
|
Offset notch 6P6C connector

|
|
|
|
|
Power Functions
This is different from NXT. Power Functions motors are
not part of the NXT system.
The GlideWheel
PF Motor controller by MindSensors.com allows
a NXT controller to operate Power Functions motors.
The Glide Wheel has the mechanical interface so it can be
connected to the drive face of a PF motor and it contains the
in phase and quadrature rotation sensor needed to make what
Lego calls a "servo motor". That's to say the Glide
Wheel when attached to a PF motor makes the motor appear to
the NXT system as a "servo motor". Note: you can
install the Glide Wheel on a motor or after some gearing (but
be sure that the direction of rotation is the same).
Power Functions™
presentation by Philo & Didier Enjary
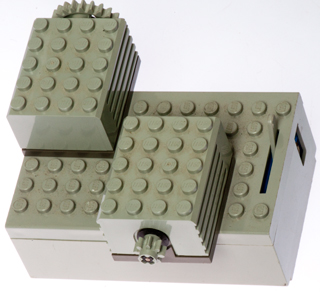
6-AA Battery box, Motors w/attached
cables
Gears, couplings, shafts, etc.
9 Volt system

The motor may be the 58120cx1 |
Lego 8882 motor
Note: 4 electrical connections (why?) not aligned with
brick bumps.
39mm dia x 48mm long
May have 2 stages of planetary gear reduction.
Note: No classical Lego bumps.

|
|
|
|
|
EV3
This is the next generation due to be released Fall 2013
Mindstorms
EV3 (Wiki)
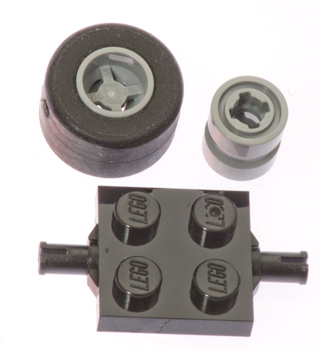
Wheels & Tires
Lego has a standardized axle system that goes all the way
back to the first generation motors. I started looking
at Lego because they offer a lot of choices in wheels and
tires that can
be used for non Lego vehicles.
LEGO Bulk Lot of Wheels Axles Tires Rims
100 Pieces (on order 11 July 2013)
14mm dia x 9mm wide
NOTE: These wheel DO NOT accept standard LEGO
axles!
|
 |
|
Lego Wheels and Tires Large 56 x 28 ZR *
NEW Dark Red (on order 11 July 2013)
|

|
|
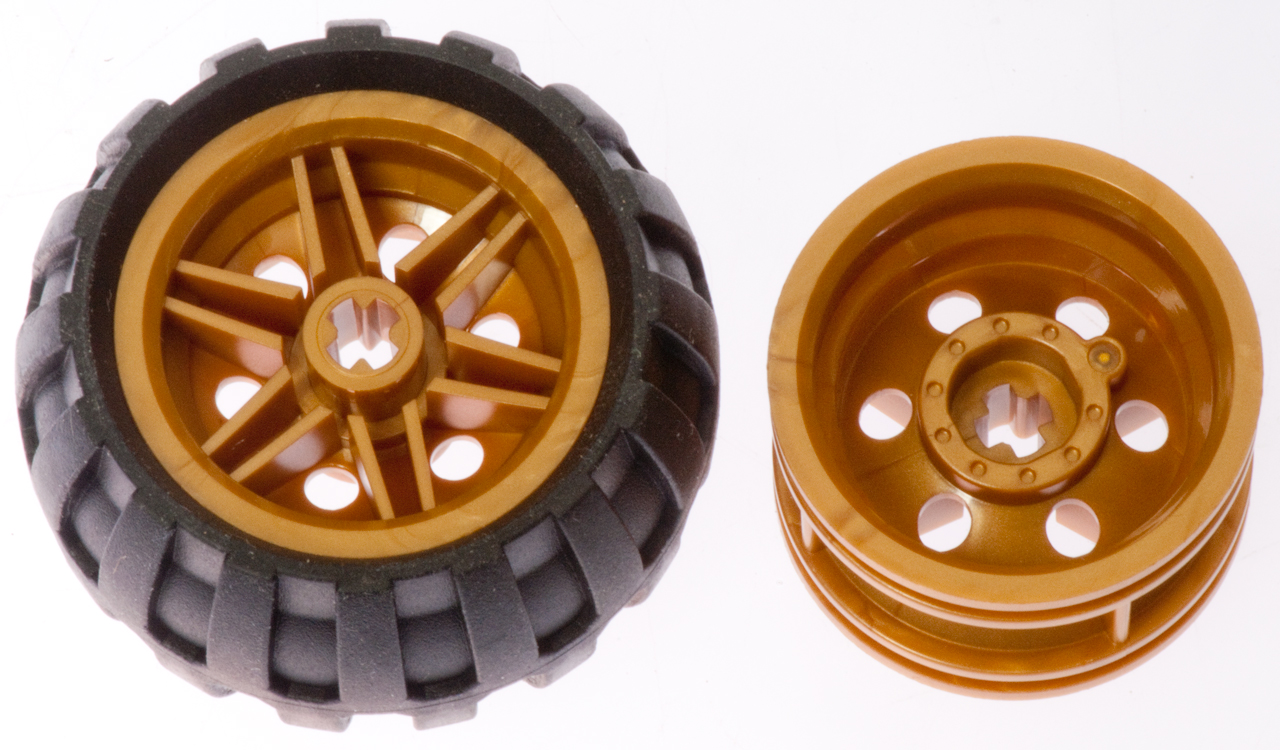
Lego Gold Wheels & Balloon Tires 43.2
mm
9441 9444 70502 Ninjago Chima (on order 11 July 2013)
|
 |
|
4 Lego NXT Technic Wheels TIRES RIMS 37 x 22 (on order
11 July 2013)
|
|
|
LEGO 24x43 wheel & tire (Lego
size width x radius?)
24mm wide x 82mm dia
Wheel:
24mm w x 43mm OD
|

|
|
Lego Wheel & Tire (Lego size? 11x21?)
11mm wide x 42mm dia.
Wheel:
7mm w x 17mm OD
|
 |
|