Bicycle Science
© Brooke Clarke 2013 - 2026
Bicycles (Wiki) are based on many scientific principles and understanding these can help in making choices and maybe in coming up with a new and better design for some specific application. I'll be looking at a Raleigh Mountain Tour bike because it's the one that was at hand, not selected for any reason other than free to me.
I live at about 1,000 feet elevation and my driveway and the street out in front have a considerable slope. So I'm looking into a bicycle that I could ride to and from my house, rather than getting one that I would have to drive somewhere in order to ride. It's my recollection that when the gear is too high and when going up hill you can stand on the pedal and nothing happens, i.e. you need low gearing in order to climb a hill. Another factor is that if the speed is too slow you can no longer balance. Would gyroscopic stabilization help?
See also: Wiki: History of the Bicycle.
This is a man's (it has a horizontal bar between the steering head and the top of the seat post) mountain (Wiki: Types, mountain) bicycle . It uses derailer gearing (Wiki).
There are three chain wheels (front sprockets) with teeth counts of: 49, 44 and 30. The rear cassette has 6 sprockets with teeth counts of: 34, 28, 24, 20, 15 and 14 teeth.
The rear tire is a 26 x 2.10" and the front is a 26 x 1.95".
One of the earliest bicycles was the Penny-farthing (Wiki). It had a large diameter front wheel so that with one turn of the pedals the bike woud go forward a reasonable distance, i.e. at a normal pedaling cadence (Wiki) the gearing (Wiki) was appropriate for a human powered vehicle (Wiki). Later chain drive was used to provide gearing so that smaller wheels could be used. Gear inches (Wiki) is a way of equating modern gearing to the diameter of a driven wheel.
The crankset (Wiki) consists of the pedal arms and chain wheel.
Climbing 15% Grade
When pedaling if you press down on the pedal and stand up, i.e. your full weight is on the down going pedal then there's some amount of power you can generate. If you have very strong leg muscles and you sit and press down with one leg and at the same time lift with the other leg (this requires using pedal clips (Wiki)) then you can generate much more power.
Classical Mechanics (Wiki) can be used to analyze various aspects of bicycle operation. For example to determine the gearing required to move a bicycle up a given slope a free body diagram (Wiki) and simple mathematics can be used.
For the free body diagram below showing the bicycle climbing a 15% grade (Wiki) we will assume all the riders weight is pressing down on the forward pedal and that the weight is split evenly between the front and rear. W= 200 pounds (91 kg) for this example.
Forces
W: Weight of rider
RRT: force of Road on Rear tire Tangent to road
RFT: force of Road on Front tire Tangent to road
RRN: force of Road on Rear tire Normal to road
RFN: force of Road on Front tire Normal to road
Note: In a free body diagram of a static situation all the forces must sum to zero, that's to say there's no net force that would cause movement.
First assume the crank is welded to the frame. Then:
RRN=W/2* COS(8.531) & RFN=W/2* COS(8.531), or RRN=RFN=W/2*COS(5.31) = 99.6 pounds.
RRT = RFT = W/2 * SIN(8.531) = 14.83 pounds.
Now assume the crank is not solid and that the gearing is such that there's no motion of the bicycle, that's to say the torque on the crank ends up generating just enough force to keep the bicycle from moving. Then:
The torque about the rear axle is 13" (half the wheel dia) * 14.83 = 192.79 in lbs. = 16.06 ft lbs
The torque about the crank pivot point is 6-5/8 * 200 = 1325 in lbs = 110.41 ft lbs. (150 Nm - note the Bafang Mid Motors are specified to deliver 160 Nm)
Note the crank torque is much higher than needed to balance the rear wheel torque so with 1:1 gearing the bike will go forward.
It turns out that my driveway has a slope of 10.1 degrees which is a grade of 17.5 % (i.e. 17.5 feet rise for 100 feet horizontal).
Now let's look at riding uphill. The Wiki page for bicycle performance says that a comfortable walk for a 150 lb person takes 30 Watts, or for a 200 lb person maybe 40 Watts.
A Watt is a Newton Meter per Second or a Joule per second (Wiki).
Assume the bicycle is going up a 15% grade at 3 MPH that's the same as 3 Mi/Hr * 5280 Ft/Mi * 12inch/Ft * 1meter/39.37inch = 4828 meters/hr or 1.34 meters/sec along the road.
But only the vertical distance counts for calculating power and that's SIN(8.531) * 1.34 m/s = 0.2 meters/sec
The vertical force is 91 kg.
Joules = m * g * ht = 91 * 9.8 * 0.2 = 178 J for each second or 178 Watts.
It will actually be higher because of the weight of the bicycle which is about 16 kg, so the power is closer to 209 Watts.
The Wiki bicycle performance page says an amaetur cyclist can produce 3W per kg of body weight, or 273 Watts.
So, 273W / 209W * 3 MPH = 3.9 MPH top speed. This can only be done using the lowest possible gear and at about 50 turns of the crank per minute (i.e. half normal cadence, i.e. a lot of straining.
In the lowest gear front: 30 teeth per turn and 50 turns per minute then there are 1500 teeth per minute of chain movement.
If a motor was connected to the chain with a sprocket that had 14 teeth then the sprocket would be turning at 1500/14 = 107 RPM.
Electric scooter 500 Watt motors operate on 24 VDC but they turn about 2600 to 3000 RPM, way too fast for a direct connection to the chain. 2019 (see Mid Motor above for a better solution).
So a jack shaft is needed to provide a gear down by 24 to 30 to one so that the motor is turning a peak PRM (i.e. peak Watts). Any lower gearing and the motor will not develop 500W, but instead a much lower power, this is why (2019 direct drive) hub motors do not help climb hills. But the newer geared hub motors probably will.
There are gear head scooter motors (Electric Scooter Parts) that have a shaft speed of about 500 RPM, but would still need a jack shaft gear reduction.
Problem with derailer gearing
There is no simple way to know how to get into the next higher or lower gear from whatever your current gear is set to.
It may be as simple as shifting the rear gear up or down, but it also may require changing both the front and rear gear settings.
The following table came from an Excel spreadsheet that has been sorted by inches per turn so that the gearing is in order.
The first three speeds (30/34, 30/28, 30/24) are all with the front 30 tooth sprocket and changing the rear sprocket, but to get to the forth gearing (44/34) both the front and rear sprockets need to be changed. The speed range is between 3.6 MPH and 28.4 MPH for cadence of either 50 (hill climbing) or 100 turns per minute (level road) of the cranks.
MPH @ TPM
Flat
Hill
Gear
Front
Teeth
Rear
Teeth
in/Turn 100 TPM
50 TPM 1
30 34 76 7.2 3.6 2
30 28 92 8.7 4.3 3
30 24 107 10.1 5.1 4
44 34 111 10.5 5.2 5
49 34 123 11.7 5.8 6
30 20 128 12.2 6.1 7
44 28 135 12.7 6.4 8
49 28 150 14.2 7.1 9
44 24 157 14.9 7.4 10
30 15 171 16.2 8.1 11
49 24 175 16.6 8.3 12
30 14 183 17.4 8.7 13
44 20 188 17.8 8.9 14
49 20 210 19.9 9.9 15
44 15 251 23.8 11.9 16
44 14 269 25.5 12.7 17
49 15 280 26.5 13.2 18
49 14 300 28.4 14.2 The top speed you can achieve depends on how powerful you are and to some extent the design of the bicycle.
There are gearsets that are internal to the rear wheel tha use internal gear wheels, not anything to do with the chain and these can have equal ratio increase/decrease for each gear setting.
http://en.wikipedia.org/wiki/Bicycle_performance
Rohloff - the down side is that the raw hub costs almost $2000. These get excellent reviews for toruing bikes because they are sealed and pretty much bulletproof.
For example the rear chain gears have the following ratios:
Teeth
Ratio to next lower gear
14
na
15
1.07
20
1.33
24
1.2
28
1.16
34
1.21
As you can see the ratios are not anywhere near a constant ratio like you can get with the Internal Hub Gearing.
For example the Rohloff Speedhub (Wiki) has 14 speeds where the ratio between all of them is 1.135.
The Shimano Alfine 700 (Wiki) has 11 speeds, but not equally spaced: first to second is about 29% the the others are about 13 to 14% each.
Many more details to follow.
Derailer History
In the TV series Murdoch Mysteries S7E2 "Tour de Murdoch" (Wiki), Murdoch invents the derailer. It is rod operated and shows up in many of the following episodes. The time frame would be around 1901. For more Murdoch Mysteries see: Typewriters.
Paul de Vivie (Wiki) developed a derailer in 1906. He also advocated for small wheels , i.e. not Penny Farthing 5 foot dia wheels.
GB189417908 An Improved Chain Wheel for Velocipedes, capable of Expansion and Contraction while the Machine is in Motion, and Apparatus Pertaining thereto, Charles Montague Linley, John Biggs, John Archer, 1895-08-24, - Whippet
GB189719280 Driving Gear for Cycles, Charles Montague Linley, 1898-07-16, - a freewheel (Wiki).
88238 Improvement in velocipedes, W. Van Anden, 1869-03-23, - freeewheel
FR553550 Dérailleur de chaîne pour changement de vitesses de bicyclettes, Jules-Edmond Guinard, 1923-05-25, -
4226131 Bicycle rear derailleur, Kazuto Yamasaki, Maeda Ind, 1980-10-07, - cites 15 patents from 1932
Types:
triangular balance or three-point balancing type, i.e.: 3181383
balance or see-saw type, i.e.: 3364762
pendulum type, i.e.: 3677103
MTB Photos
Fig 1 Left overall
Fig 2 Right overall
Fig 5 Three Front chain wheels (sprockets) 49, 44 & 30 teeth
Fig 6 Rear sprockets 34, 28, 24, 20, 15 & 14 teeth
Electric Motor Drive Methods
On my web page for recumbent 3-wheel bicycles I looked at various drive methods with hill climbing as a key consideration. On my Motorized Bicycle web page I looked at gasoline add on power.
I've discovered what may be better drive methods and both involve electric motor kits where a planetary gear (Wiki) is incorporated with the motor in one unit. This eliminates the need for a jack shaft, i.e. the motor provides much more torque.
Hub Motors
Direct Drive
These motors have no gearing between the motor and frame. On the down side the torque is limited so these are not good for starting out on a slope. An advantage is that they can be used for regenerative braking (Wiki) which might provide a small amount of battery charge. But they also can be run in the opposite direction simile by reversing a couple of wires. Having reverse as an option is nice on trikes and quads, not not much use on a bicycle.Geared
If a geared hub motor did not have a freewheel (Wiki) when the power was decreased it would be like hitting the brakes. So geared hub motors can not be used neither for regenerative braking nor reverse motion. But the huge advantage is the high starting torque for climbing hills.
Here is a GRIN Kits page with numerous types of electric motor kits.
Heinzmann - traction electric motors, some for bikes -
US20150137669, Mechanical system for a simple and accurate to assemble in-wheel electric motor, Elaphe Ppgonoske Tehnologije, 2018-01-09 - for use in cars, direct drive (no gears), includes disk brake.
Bafang now makes a mid drive that's installed by replacing the crank cassette with their motor which has a built-in planetary gear, see Patents on Motorized Bicycle/Electric/Mid Drive web page.
YouTube:
These come in a number of power ratings between 200 and 1,000 Watts (BBSHD). Note 746 Watts - 1 Horsepower. These motors are the heart of many eBikes and are re-branded with the bike name along with a hefty price increase.
Solar Powered EBike DIY - Part 1 - he did not use the bracket off the rear axle - so Part 1 did not happen
Solar Powered EBike DIY - Part 2 - Electrical System - Genasun GVB-8-WP Charge Controller - for lead acid batteries
Solar Powered Bike DIY - Part 3 - Huge Solar Panel Mount! - none of this was used, the Aevon trailer is how the panel was mounted
Solar Ebike cycling to China! The Sun Trip 2018! -
Solar Powered Trike (e-bike) Cycling to China!! (1:21) Commercial electric utility trike
Touring Ebike Review After 13000km to China - (5:22) BBSHD Em3E Battery, 14S7P - 14S9P -
Remove factory grease inside behind the sprocket and replace with a grease that's compatibly with the plastic gears inside.Aevon Trailers STD 100 13000km Review and Disassembly - part 2 of the above review
(6:59) Rear hub is not a derailer, but rather a Rolf internally geared hub.
Surly, who made his frame does not make trike frames. Likes the Surly Tuggnut (Snuggnut)
(9:49) Cane Creek Thudbuster Long Travel Seat Post on solid tail bike (250 lb max weight)
Aevon Trailer model STD 100 -
Greased nylon gear BBSHD "1200Km" -
Bafang BBSHD internal greasing - Mobil 28 purple grease compatible with nylon gear.
Luna Cycle Tear Down of the BBSHD -
BBSHD 1/8 secondary cover removal, 2/8motor core removal, 3/8 nylon gear plate removal, 4/8 nylon gear removal(Allen wrench did not work), 5/8nylon gear removal & bottom snap ring & shaft, 6/8 nylon gear direction for assembly (grease prior to snap ring assembly), 7/8 nylon gear Mobil grease 28 and plate re-install, 8/8 motor core rotor install and re grease. KHS 3000 4 Season BBSHD time lapse install.
BBSHD Nylon Gear REPLACED with METAL! Sound comparison test - both the Aluminum and Brass gears make more noise.
Bafang 8FUN - Noisy Motor Tear Down - motor rotor helical gear meshes with helical nylon gear he thinks the problem is an undersize (0.0001") shaft, but maybe it was lack of grease on nylon gear? - Bafang 8FUN Mid Drive - Repaired -
There are also some hub electric motors with a built-in planetary gear, which are not as good for hills as the mid drive where you retain the rear gear change. These may be a lower cost alternative. But to find out some specifications on torque are needed. I asked Bafang-e and got an answer from Bafang USA direct (only sell mid drive stuff) about their motor and the answer was "We are a seller of these motors not the manufacturer. Each seller can have different motor programing so we recommend you contact the company purchased your motor from. This is not something we have readily available." It's hard to tell which hub motors are direct drive and which have the internal gears.
YouTube: Jack Butler: Electric Bike Review:Bafang Factory Tour Suzhou China - Part 1 of 8
Company started with Hub motor in 2003YouTube: Electric Bike Review: Bafang Factory Tour Suzhou China - Part 2 of 8
Mid Drive for City Bike, Shaft Drive for rental bike, Racing, 250 W Mountain, 500 W, 1,000 W Off Road, Mini 110W front, 110W Rear (to look like no motor),
DIY Kits (5:12) you can see gears in background,
Mid Motor Production (7:24) Gears,YouTube: Electric Bike Review: Bafang Factory Tour Suzhou China - Part 3 of 8
Hub motor production, (8:56) Fat Bike Hub motor, (8:55) Rental bike solid wheel,YouTube: Electric Bike Review: Bafang Factory Tour Suzhou China - Part 4 of 8
DIY BBS Mid motor housing assembly, developed in 2012, 250 to 1,000 Watts (BBS1, BBS2, BBSHD), (3:09) controller is a removable assembly, (5:59) BBS Test RoomYouTube: Electric Bike Review: Bafang Factory Tour Suzhou China - Part 5 of 8
Electronics, (1:12) Testing controller with motor connected to dynamometer, (3:49) Controller production line, (6:19) Potting controllerYouTube: Electric Bike Review: Bafang Factory Tour Suzhou China - Part 6 of 8
Indoor test laboratory for complete system including environmental, (2:53) Mini Hub motor on vibration, (3:30) test crank torque sensor, (8:16) motor life testing (24/7 for 2 months, they use hub motors as loads for other motors under test, (8:16) testing orange rental solid wheel assembly (10 seconds on, 20 seconds stop),YouTube: Electric Bike Review: Bafang Factory Tour Suzhou China - Part 7 of 8
Testing buttons on control panel, (1:04) battery test (BMS), (2:11) Outside ramp test (10 & 15 degrees),YouTube: Electric Bike Review: Bafang Factory Tour Suzhou China - Part 7 of 8 (not posted as of 29 March 2019
Crystalyte - Crown TC65 / TC4065 motor - Hub motor 250 to 6kW
Controller Programming
It's possible to program the Bafang Controller.
YouTube:Bafang BBSHD Configuration Tool HOW TO - eBay search term "Bafang programming cable", E-Bike Conversion – Software -
PoweredRide - BBSHD Programming Resources -
Luna Cycles offers a stand alone programmer instead of using a laptop based system. This device does not work with the new Bafang Ultra Max.
YouTube: Luna Black Box Programmer for BBSHD and BBS02 - to use disconnect display and plug bike into black box.
GitHub: About the TSDZ2 Flexible OpenSource firmware/embedded software -
Patents
Hub Motors
The hub motors are characterized by front or rear wheel and by the type of brake (Roller-drum, V or Disk). Note a rear wheel will have provision for a gear set which the front wheel motor does not typically have.
The gear reduction in hub motors might be1:4.42, 5:1, 11:1 or 12.5:1. FM G010.250.D - is a Front Motor, model G010 rated for 250 Watts and Disk brake.
2019 April 5: The Bafang
"This front-drive motor, which is compatible with the disc brake, has a rated power of 250W, a reduction gear ratio of 1: 4.42 and a maximum torque of 32 N.m, providing ideal power for vehicles. This motor is suitable for touring bikes, commuter bikes and mountain bikes. It can be black or sliver."The Bafang FM G020.250/350.D - is a Front Motor, model G020, rated for 250 Watts continious or 350 Watts intermittent
"This front-drive motor, which is compatible with the disc brake or V brake, has a rated power of 250W and 350W, a reduction ratio of 1: 5 and a maximum torque of 45N.m, providing ideal power for vehicles. This motor is suitable for touring bikes, commuter bikes and mountain bikes. It can be black or sliver."
Mid Motors
The Bafang MM G320.750 - is a Mid Motor, model G320 rated for 750 Watts. Rated for 48 Volts. This motor can be retorfitted to an existing bicycle by replacing the crank.
"With an integrated speed sensor, this mid-drive motor, which is compatible with a 68-120mm bottom bracket, has a rated power of 750W, a reduction ratio of 1: 21.9 and a maximum torque of 160 N.m, will provide the rider with great explosive force when starting the system. Highly strong and efficient, this motor greatly enhances riding joy and is suitable for mountain bikes and sand bikes which are the favorites of riders who love challenges as well as transport bikes. This motor is black."The Bafang MM G320.1000 - is a Mid Motor, model G320 rated for 1000Watts. Rated for 48 Volts. This motor can be retorfitted to an existing bicycle by replacing the crank.
"With an integrated speed sensor, this mid-drive motor, which is compatible with a 68-120mm bottom bracket, has a rated power of 1000W, a reduction ratio of 1: 21.9 and a maximum torque of 160 N.m, will provide the rider with great explosive force when starting the system. Highly strong and efficient, this motor greatly enhances riding joy and is suitable for mountain bikes and sand bikes which are the favorites of riders who love challenges as well as transport bikes. This motor is black."The Bafang MM G510.750/1000 - is a Mid Motor model G510 rated for 750 Watts continious and 1,000W intermittent. This motor mounts to a custom bracket and can NOT be retrofitted to an existing bike.
This is very similar to the Bosch Drive Units. All the Bosch drive units are limited to 250W and 20 MPH which I think is required to get no license status in the EU. The Bafang drive uints are grouped into U.S. street legal and off road.
"The mid-drive motot constantly samples relevant information at a frequency of up to 80k Hz via a torque sensor and two speed sensors which are all highly sensitive. The resulting data on crank torque, vehicle speed and the speed of rotation of the pedals is made available to the controller, ensuring precise control of the vehicle while achieving the highest possible efficiency. The Max Drive System puts the rider in complete control. In spite of a generous power output and a maximum torque of more than 160 N.m, the motor operates in virtual silence. The modular motor design and integrated controller make disassembly easier and improve service responsiveness. This motor can be black."
e-Tricycle (2-Front, 1 Rear wheel)
- SR PA211.32.ST Torque/Speed sensor install between cranks (Bottom Bracket sizes: 68;100;73;84;110;120),
- Rear Motor RM G070.250/350/500.D -
"This rear-drive motor, which is compatible with the roller brake, has a rated power of 250W/350W/500W and a maximum torque of 65N.m, providing ideal power for vehicles. This motor is suitable for touring bikes, commuter bikes and mountain bikes. It can be black or sliver."- DP C18.UART Digital Panel -
- EB 1T4.AX.XXXX - interconnecting cable
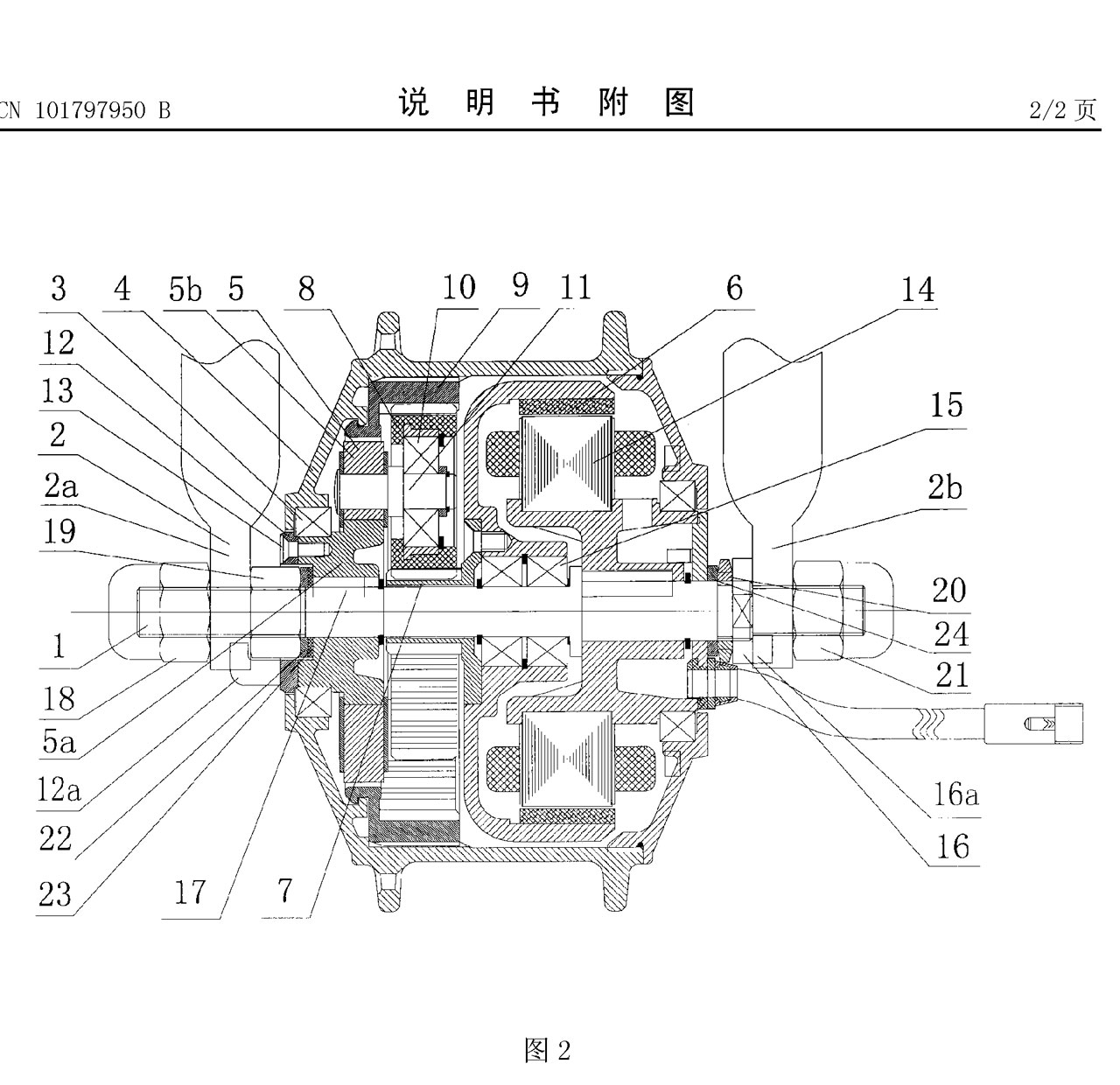
CN101797950B, Hub of electric bicycle, Bafang, 2010-08-11
9, 10 & 11 appears to be a planetary gear.
In the reviews the Bafang hub motors get better reviews than what I'm guessing are direct drive hub motors.
The below patents have higher numbers, i.e. came later
CN101856948B - also shows gears
CN201245225Y Rapid dismounting device for electric driven hub - Quick Release wheel - I don't read Chinese, so???
CN203800745U Electric bicycle wheel hub motor device, 2014-08-27 - also shows gears
CN201647059U Electric bicycle wheel hub - - also shows gears
CN201703522U Electric bicycle hub - - also shows gears
CN201712417U - also shows gears
CN202435192U Wheel hub power generation motor - internal 6V generator for lights - also shows gears
CN205891152U Electric bicycle integral type in -wheel motor, 2017-01-18 - - also shows gears
CN202634178U Roller brake motor - also shows gears
EP2143628B1 Electrically assisted bicycle and unit adapted for use in electrically assisted bicycle and capable of being attached to bicycle body frame, Bafang Electric (Suzhou) Co., Ltd., 2018-08-01 - Mid Drive
Calls with paragraph on prior art:CN103192938B Mid-motor having reverse braking function and installed on common bicycle, 2015-04-08 - "coaster brake" (Wiki)
US5749429 Power assist apparatus of power assisted bicycle, Suzuki KK, 1998-05-12 - very similar in appearance to BBSHD, but the torque of the motor = torque of pedal
The key improvement is " to provide a simplified power assisting mechanism useful in the power-assisted bicycle and to facilitate the installation of the same mechanism to the bicycle body frame."
CN204674764U A put motor link in, and put motor in with for electric bicycle - special bracket replaces bottom bracket to allow changing motors, 2015-09-30
CN205971729U Electric bicycle and variable speed auxiliary device thereof, 2017-02-22 - something related to derailer chains
EP3056421A1 Electric bicycle central axle torque speed sense device, 2017-08-09 - senses crank RPM and Torque
CN201268382Y Drive apparatus of electric bicycle - requires special bicycle build - motor totally inside larger diameter cassette.
Also see Motorized Bicycles - Mid Drive
CN202384824U Battery Box Drawer, 2012-08-15 - ?
Batteries
Hailong pioneered the Shark (aka Down Tube) battery package.
EM3ev - Hub Motor Info - the 48V (13S5P) comes in the Jumbo Shark package with Ah options of: 14.3, 14.5, 17 Ah.
Makes batteries in standard sizes: Super Shark (56 cells), and the larger Jumbo Shark (65 cells, 368 x 113 mm) as well as various Rectangle and Triangle packs
The battery BM9-145 for the M-360 is rated: 48V & 14.5 AH (696 Watt hours).
Bafang: 48V - 17.5 AH battery in Jumbo Shark package, 52V - 14Ah Jumbo Shark package,
Hi-C Battery - Many variants of the Dolphin, Dorado and Black Rack & Black Fish packages
Hailong: maybe the first generation Shark package(13S4P) 360(365)x90x90mm. 36V. 52 cells when battery holder used and no BMS, with BMS 44 cells.
There are also Hailong-1 (52 cells w/o BMS) (361x91x90mm): 36V (10S5P) 48V (13S4P)or 52V (14S4P), Hailong-2, 65 cells (13S5P) (360x92x120mm) and Hailong-3: 365x110mm, (13S5P) 36V (10S7P) or 52V (14S5P) packages.
On Aliexpress the small Hailong case (368x96x90) holds 56 cells and the large case (368x90x112) holds 72 cells.
The Sunbound 48V11.6Ah Dolphin case is 360x135x80mm. The Addmotor M-550 uses this battery, but Addmotor does not sell it as a standalone part. (why not?) The M-560-P7 uses a BM9 48V 14.5 AH Dorado battery case. HI-C has a 48V 16Ah Dorado.
Cell Voltage
3.6 to 3.7 Volts per cell for Li-Ion cylindrical cells.
Voltage
Series
12
3
24
7
36
10
48
13
52
14
Cell Amp hour Capacity
2.8 Ah to 3.4 Ah per cell for 18650 size Li-Ion cells.
Directly related to AH capacity is Peak and continuous current.
This is between 5 and 9 Amps per cell for continuous and between 6 and 11 Amps per cell for Peak.
So the continuous current will vary between 24 Amps and 54 Amps, while the peak current will be between 30 and 66 Amps.
AH
Parallel
17
5 or 6
14.5
4 or 5
10
3 or 4
From the above two tables you can see that the number of cells varies with both Voltage and Ah capacity from a minimum of 40 cells to a maximum of 84.
Packages
Most have a battery holder with a some maximum number of cells and no provision for a Battery Management System (Wiki: BMS).
For the Hailong case in order to install the BMS inside the battery case maybe a half dozen cell locations must be empty.
Package
36V
48V 52V Shark/Hailong/Down Tube
10S5P - 50 13S4P-52
EM3ev Super Shark
14S4P - 56
EM3ev Jumbo Shark
13S5P - 65
Causin (Amazon) D1 (52 cells max)
D2 (60 cells max)
10S5P - 50
10S6P - 60
13S4P - 52
13S5P - 65
Pedal Forward, Crank Forward (Wiki) or Flat Foot Design
Electra Bike (Wiki): Flat Foot Technology - "Townie" -
Trek Bikes: all low handlebard, no seat backrest, i.e. for off road treking, not for comfort
SixThreeZero: What is a Pedal-Forward Bicycle? -
BicycleMan: Crank Forward -
Day6 Bikes: all are Crank Forward designs with backrest type seat -
Rans Bikes: Why Ride Crank Forward? - 3 models with different seat post tilt angle.
"Moving the crank forward creates an automatic dig in effect when pulling on the bars. In fact, you can apply more than your own weight to the pedals, making standing-to-climb optional. To get the best effect the handlebars need to be adjusted to just 1″ or 2″ above the highest point of the knee."Light Foot Cycles - City Trike Electro 22" - has rear differential, 250 Wa Heinzmann Electro Drive Motor/ pedal assist
This is a way of arranging the relationship between the seat, pedals and handlebars.
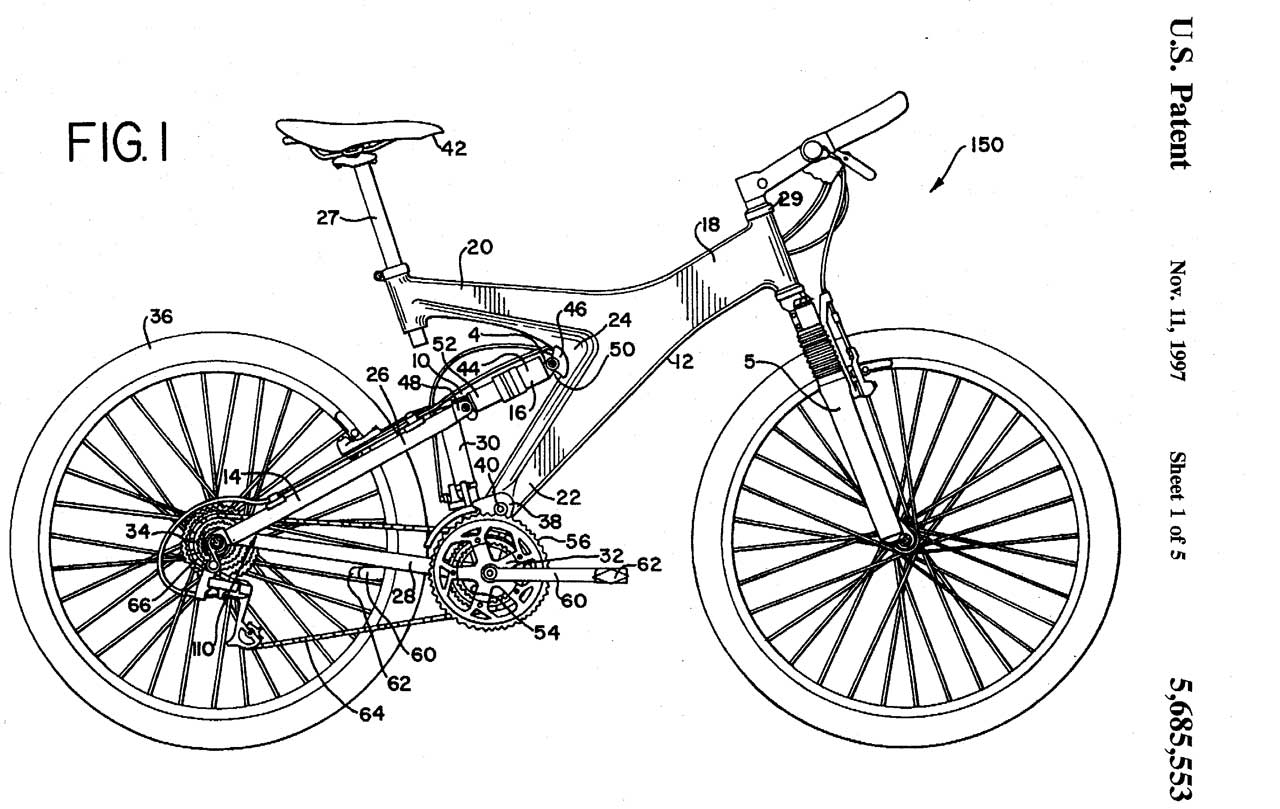
5685553 Suspension for a bicycle having a Y shaped frame, Weston M. Wilcox, Matthew A. Rhoades, Michael L. Zeigle, Trek Bicycle Corp, Nov 11, 1977, 280/283; 280/281.1; 280/288.3 - mainly to add suspension, but also a Flat Foot design.
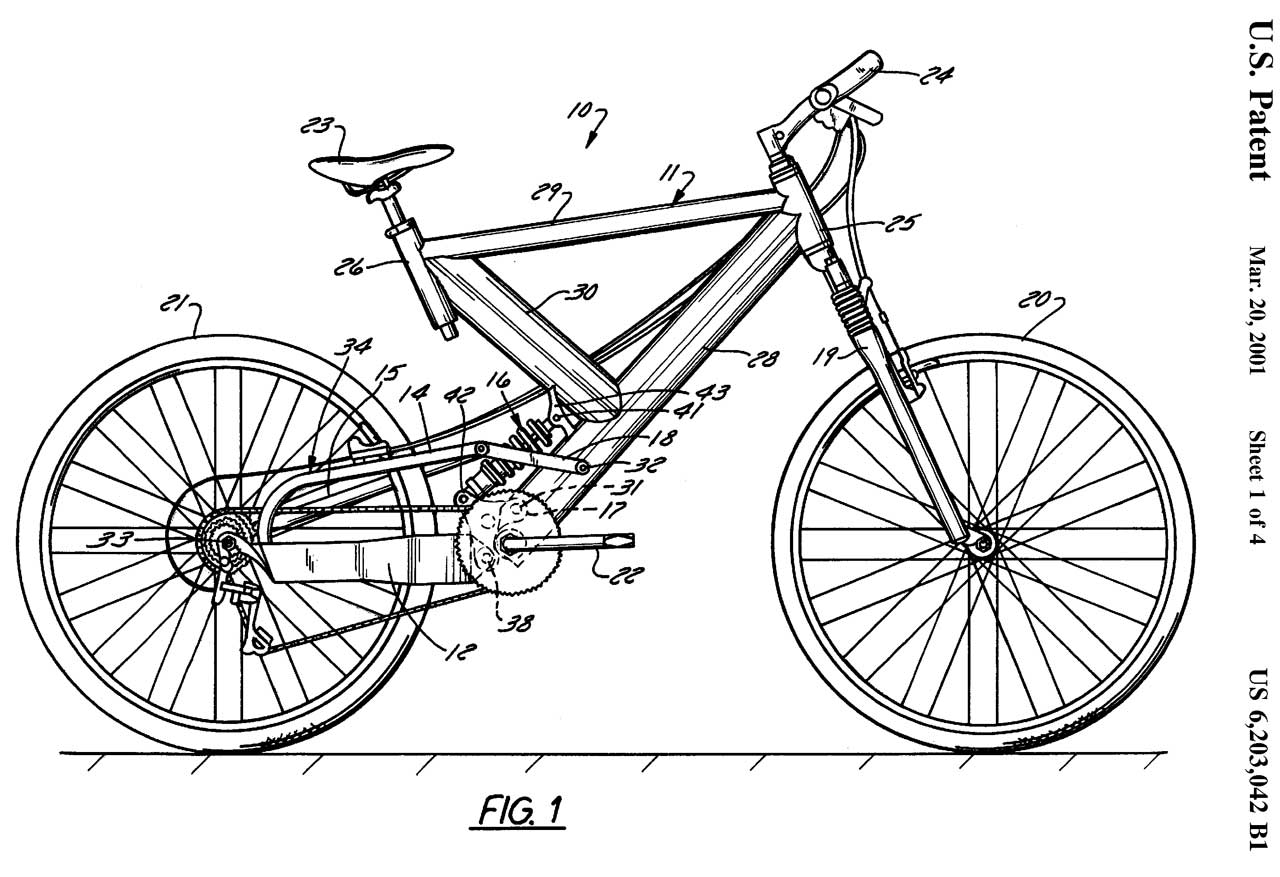
6203042 Bicycle rear suspension system providing relative rearward motion of rear axle, Weston M. Wilcox, Trek Bicycle Corp, Priority: 1998-02-20, B62K25/286 Axle suspensions for mounting axles resiliently on cycle frame or fork with pivoted chain-stay the shock absorber being connected to the chain-stay via a linkage mechanism - also a Flat Foot design.
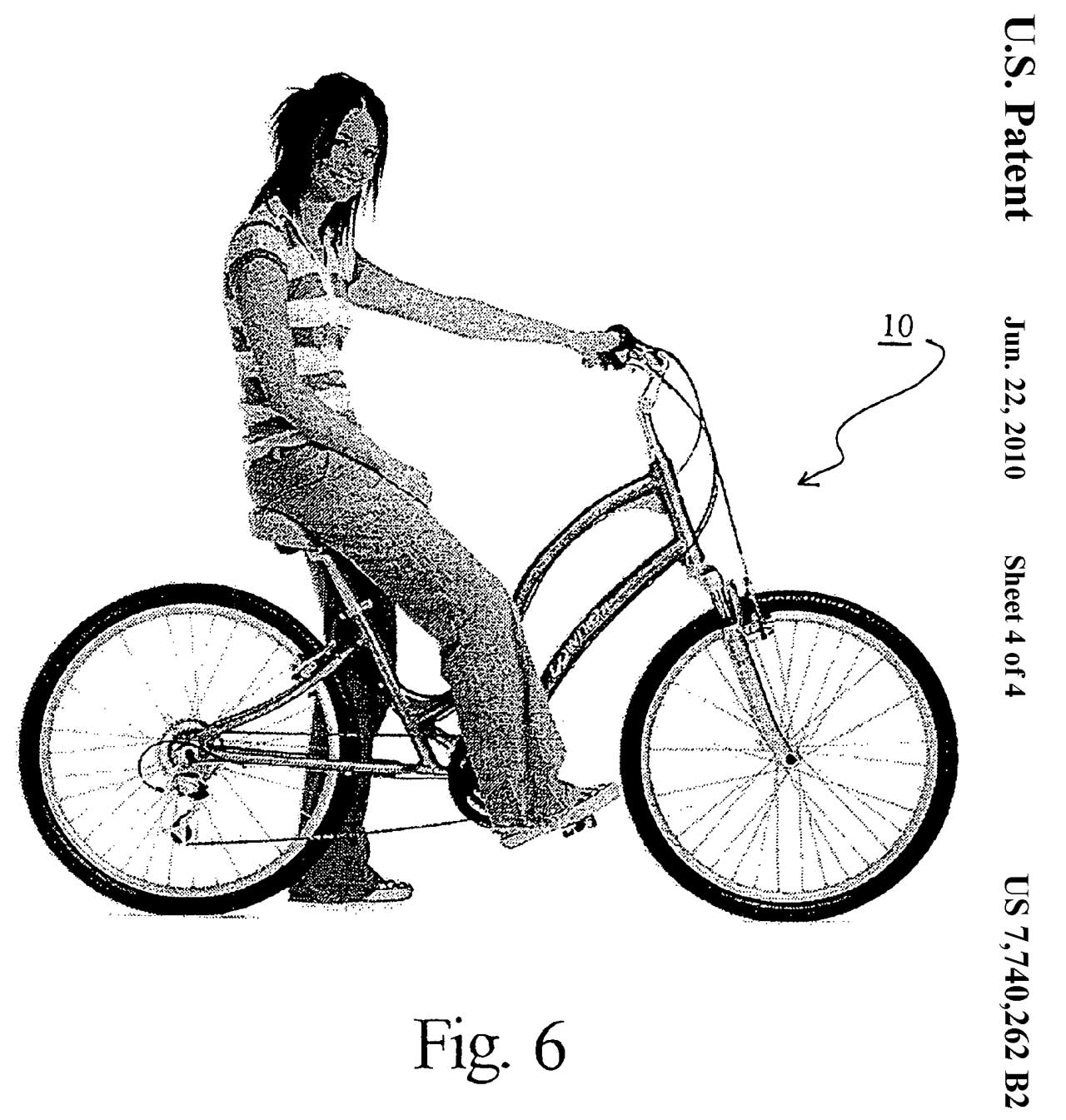
7740262 Easy riding bicycle, Benno Baenziger, Trek Bicycle Corp ( Electra Bicycle Company, LLC), priority: 2003-10-10, B62K3/005 Recumbent-type bicycles
Note crank is in front of seat not under seat. Patent uses horizontal tube from end of seat down tube forward to crank,
but it can be done by sloping the down tube from seat directly to crank.
Also not rider's left foot is flat on ground.
Rider can sit or stand while pedaling.
8876136 Easy riding bicycle, Benno Baenziger, Trek Bicycle Corp ( Electra Bicycle Company, LLC), priority: 2003-10-10,B62K3/005 Recumbent-type bicycles
Fat Bikes (Wiki)
These bicycles use fat tires (100mm) which allows riding on soft ground, sand or snow. This requires a frame where the crank is about the same size, i.e. 100mm, so that tire will clear the frame. The Bafang mid motors come in two sizes (conventional and fat).
Fat Quad - Trike eBike
This idea would be to have a small utility vehicle, similar to a Quad or ATV (Wiki). It could carry stuff and tow the garbage and recycling cans to the street and back as well as moving stuff into and around the forest. Maybe go to and from the mailbox about a mile each way. Having "fat" tires makes this feasible since normal 10-speed skinny tires would easily get stuck in the dirt. Note ground clearance is an issue, not sure how much is needed but a few inches is not enough.
Utah Quad
Utah Trikes - Fat Cat-4 Quad - has rear differential, 90 gear ratios, stock $5000 + $1699 for Bafang 1,000W mid drive motor -
Fat Cat Quad - no motor, only a few inches ground clearance
YouTube - 2017 UTCustom Eco Quad 1600W 3kW peak Electric Quad 20x4 tires, not Bafang, looks like Cyclone stand along motor - noisy
Electric SunSeeker Fat Tad CXS with Cargo Racks by Utah Trikes Bafang 500W & 2 batteries
YouTube: ICE Full Fat Trike with Custom Middrive 750W Motor - good ground clearance for off road, - Full Fat (w or w/o motor) - all Tadpole design trikes
The Fat Cat Electric Monster Quad - 1000W mid drive Bafnag + 6 batteries (manually switched one in use at a time)
e-Swincar (Swincar USA)
Amazing ability to go over rough terrain. - Designed with accessibility in mind, Swincars can become adaptive vehicles like no other
Swincar e-Spider - YouTube -Videos - Electric Quad with leg like suspension
History - e-Spider Model - YouTube 100% electric 4 hub motors (type?) (1:27) remote controlled car -new adventure - Adventure Sports - SWINCAR e-Spider - Click on Specs - awaiting info on price. On in the UK for just under $18,000. - Reviews - 4kWh lithium-ion battery
Pocket Classics sells miniature versions of classic cars for adults to drive (larger than the cars for kids) but also sells the regular e-Spider.
EP1885594B1 Pendulum compartment road vehicle,Pascal Rambaud, Mecanroc, 2008-10-22 -first generation drawings
FR3020031B1 Vehicle possessing a frame and swinging platforms,2017-10-20 - no info on Google

AU2015247243B2 Vehicle having a chassis and a pendulum nacelle, Pascal Rambaud, Swincar, 2018-11-01 - many drawings
The legs that form the suspension for each wheel have the feel of the legs on Boston Dynamics walking devices except they have wheels instead of feet. This patent shows the assignee as Swincar.
AddMotoR
Add Motor Electric Bikes - some interesting models M-5800 has the Bafang 1kW mid motor.
The M-350 fat trike may be what I'm looking for? Uses a front hub motor. Electric Bike Review AddMotoR Motan M-350 -
2017 Dec 13 - YouTube: Intro M-350 -How to assemble the handlebar/wheels of Addmotor M350 -
YouTube: AddMotoR MOTAN M-350 Video Review - Bafang geared hub motor
ElectricTrike.com - Electric Fat Trike - is the M-350 but with upgraded motor to 750 W + comes assembled.
M-350 on Amazon by AddMotoR $3k; M-330 $2.6k has headlight, the M-350 does not have headlight.
M-360: 160mm Front disk Brake Tektro
2019 M-360 (YouTube) to be introduced toward end of April 2019 all three wheels are 20" (today= 3/29/2019).
Addmotor M-360 Trike new web page.
Other 3 & 4 Wheel (Wiki: Quadricycle, List of Motorized Trikes)
The Bpm Imports model T-950A has all 20" wheels instead of the 24" front drive wheel of the M-350. Not only more compact, but also should be better at climbing hills with lower top speed.
The Goplus has three 20" wheels and mounts the smaller 10AH battery pack horizontally under the cargo bin. 500W motor in front hub. $1.6k
Azub Fat Tad Trike -
Toyota - iRoad - project seems to have died in 2017
Liberty Trike - $1.5k mobility scooter -
e-BikeKit - geared hub motors up to 1kW, front and rear kits.
Schaeffler Bio-Hybrid - YouTube 2016: Bio-Hybrid | Fully Charged -
Pedilio - electric 500 Watt Velomobile- Interesting Bikes and Innovations Spezi 2018 Germersheim (video shows steering "wheel")
evovelo - electric 1000/1500 Watt Velomobile (specs.pdf)
kervelo - gearboxes - one with 250W motor and 250 N-M torque & choice of 4, 6 or 12 gear ratios. - to be integrated into bike frame.
Trego - replace front wheel with two wheels and cargo shelf - parallelogram allows wheel tilt.
Luna Cycle - Bafang Ultra 1500 Watt motor (much improved over the BBSHD)
Cyclone Taiwan - Hi-power motors
Rohloff Speed Hub - review -
The Delfast - Prime bicycle has a range of 236 miles. It does that by using a 750 Watt 4 turn rear hub motor and a 48V 64Ah 13S20P battery (i.e. over 3kWh capacity).
PEBL - 3-wheels, 2 steering in front, rear powered. unlike the ELF it can be enclosed for protection from rain and snow. Starting at $8750.
YouTube 2018Tokyo Motor Show 5 - Trucks and Bikes | Fully Charged - (9:32) Electric Bikes: Yamaha MWC4 Magic Wheel Commuter - a titling 4-wheel vehicle
Tangent Ascent - 6kW mid motor - Need 120A from battery so . . . Hi-C Battery - 52V 23Ah Sony VTC6 150A BMS (1196 Wh, 14S8P) - 8 each 20A cells in parallel is 160Amps. - Point65 Back Pack (GTX 20L) to hold battery & protect back in case of accident. - ONYX Racing mountain bike hub for strength -
Kronfeld Motors - RAHT (Recharging Anthro-Hybrid Transport) Racer 2-front steering wheels, 1-rear powered wheel 20kW motor + pedeling. $24k
20130081892 Human-rechargeable electric vehicle, Richard Kronfeld, Lyon Smith, Russell Bockin, Steve Castellotti, Rahtmobile, Llc,2013-04-04 - "..an electric vehicle with human power input provided by a high output pedal-driven generator."
9956880B2 Variable resistance serial hybrid electric bicycle, Richard Kronfeld, Lyon Smith, Russell Bockin, Steve Castellotti, RAHTMOBILE LLC, 2017-06-08 -
Arcimoto - 3-wheel EV - $11.9k price target -
VeloMetro - 2 front steering wheels, 1 rear powered wheel.
20160176473 (US9469373) Drivetrain system for an electrically assisted human powered vehicle, Jonathan Faille, Kody Jensen Baker, Benjamin John Cornwell-Mott, VeloMetro Mobility Inc., 2016-10-18 - uses a second motor for reverse movement and/or regenerative braking. The 2 motors can both be used for forward power. Cites 18 patents,
Electric Bicycle Center - Raleigh Tristar iE Video Review - $2.6k Premium Electric Trike - EBR - mid drive motor powers only right rear wheel - allows braking while powered (good)
How to assemble the genuine Trike Bike - www.trike-bike.com.au -
Neighborhood Electric Vehicle (Wiki)<= 25 MPH, GVW<=3,000#
Low-speed vehicle (Wiki)<=25 MPH, GVW<=3,000# (NHTSA)
Clean Vehicle Rebate Project (CVRP), PG&E provides discounted rate plans to residential customers for electricity used to charge electric vehicles
Alternative Fules Data Center - California incentives - man y of these are for a specific county
GEM car US - the GEMe2 starts just under $10,000. 6.7 HP, 25 MPH, 800 lbs. 4 wheels, - LSV
PodRide - 4 and 3 wheel versions, pedal + 250W motor assist, enclosed for winter, YouTube
Polaris Ranger EV looks like the GEM eM 1400 LSV -
Screecher - 4 wheels, each rear wheel has a hub motor (geared? yes 4.5:1) Starting at $2500Boeki USA - mini trucks not street legal, $4k to $10k used.
Rungu - Electric Juggernaut - two closely spaced front wheels - YouTube Factory Videos - being narrow it can go where a conventional bicycle can (around a locked gate) where a normal trikes can not. It's a Tilting 3-Wheeler.
Patent Fig 5 (page 7) Ackerman Steering (Wiki)
Peacock Groove - Industrial eTrike -
Haley Tricycles - Vending, Cargo - front box good for maneuvering in tight quarters like city traffic
Nihola - front box
Worksmen Trike - Electric Trikes -
Benno - eBikes - Boost Cargo Bike - Bosch motor system
Riese & Müller - eBikes Bosch based
Butchers & Bicycles - Mk1-E Cargo Bike: Tilting front box, Bosch motor
Pedego Electric Bikes - unspecified hub motors, the "Elevate" uses the Shimano E-8000 mid drive system250 Watt motor
Urban Arrow - Family - Front box Bosch motor, kid hauling
Contes Engineering - YouTube:Athos - 4-wheel independint suspension, narrow track, Fat tires. Very nice and also would be very expensive
People for Bikes - pdf - The M-350 is a throttle on demand, Class 2 calls it"throttle-actuated" with a 20 MPH limit. If the speed limit is increased to 28 MPH then it is Class 3.
When I was a young boy the Schwinn bicycle (Wiki) had a 3-speed Sturmey-Archer rear hub. These were later called 3-speed bikes when derailer bikes were called 10 speed. The IGH has a number of advantages the key ones being reliability and simplicity. Derailleur gears (Wiki) offer a higher number of speeds but at the price of being easily bent or not working.
Sturmey-Archer now makes an 8-speed rear hub with internal gears and it can be fitted with a sprocket with 20, 23 or 25 teeth. These sell for under $200.
The Rohloff (factory, Wiki) IGH has an excellent reputation consistent with it's almost $2,000 price tag. The new E-14 gear changer designed to work only with the Bosch motor and SPEEDHUB 500/14 IGH.
YouTube:Sturmey Archer Epicyclic gearing - 3/4, 1 or 4/3 ratios i.e. 3-speeds.
Heritage - links to many historical photos and documents
Patents
GB189606062 Improvements in Two-speed Driving Gear for Bicycles, William Reilly, Charlton Haigh, Filed: 1896-03-18 - 2-speed according to Wiki
753785 Variable gearing for velocipedes or road motor-vehicles, James Archer, Three Speed Gear Syndicate Ltd, 1904-03-01 - 3-speed - Archer was a friend of Reilly who could not compete with "The Hub" company.
2799183 Free wheeling bicycle hub, Rhein Hans, Brendel Ludwig, Fichtel and Sachs AG, 1957-07-16 - "..a novel friction socket controlling the free wheeling mechanism of a bicycle hub including pawl actuated means for rotating the hub socket during gear driving of the bicycle."
2844050 Simplified free wheeling bicycle hub, Brendel Ludwig, Fichtel and Sachs AG, 1958-07-22 -
Based onYouTube:Death of The Derailleur? Honda’s Incredible Bicycle Gearboxes (All 3 Generations), 15:52 -
First Generation - @11:32 -
7004487 Continuously variable transmission for bicycles, Shinya Matsumoto, Naoki Inoue, Yoshiaki Tsukada, Honda Motor Co, 2006-02-28, - CVT (Wiki)
Third Generation
20060240919A1 Bicycle transmission,Shinya Matsumoto, Akio Senda, Honda Motor Co,2006-10-26, - derailer in a box
There are various ways to pedal a bicycle or tricycle.
When I was in high school some friends had bicycle frames imported from Europe and outfitted them with Derailleur gears (Wiki). The pedals had Quill pedals (Wiki) where there is a metal clip that goes over the top of the shoe and a leather strap that is tightened to lock the shoe to the pedal. This allows both pushing down on one pedal while simultaneously lifting up on the opposite pedal. This greatly increased the power. There were a couple of problems. When you stop you must quickly loosen the strap on one side so that you can use a foot to keep from falling over.
The other problem relates to clips on the bottom of the shoes. To keep from pulling your foot from the pedal-clip-strap, which was easy to do, a cleat could be affixed to the sole of the shoe which had a slot that went over an edge on the pedal. Once strapped in with cleats you foot was not coming off the pedal. The problem was if you walked indoors the cleats would damage wooden floors, so it was necessary to remove you shoes before going indoors.
While there are more powerful pedaling techniques that are possible, it's questionable how appropriate they are for older riders.
Sitting, Street Shoes & No Arms
1. This is the simplest and lowest power way to pedal. You stay on the seat and use your legs to push down on the pedals.
2. If the seat has back support, i.e. a recumbent or Pedal Forward, then you can use the backrest to get more pushing force from your leg. More power that without the backrest.
Standing, Street Shoes & No Arms
This is more powerful than Sitting since your full body weight is used on the down stroke of one pedal.
Maybe not more powerful than legs plus backrest?
Sitting, Street Shoes & Arms
You pull up on the handlebars to increase the downward force on one of the pedals. More power than the Street Shoes & No Arms method.
Sitting,
Standing, Cleat Shoes & Arms
This method may be the most powerful, eBikes and eTrikes may have more power.
Michael Jackson 45 Degree Lean (YouTube)
The patent cites special shoes used on bicycles.
550409 Attachment for Bicycle Pedals, C.M. Hanson, 1895-11-26 - cited by 30 patents
4538480 Bicycle pedal and shoe, James J. Trindle, 1985-09-03, - cited by Jackson
5255452 Method and means for creating anti-gravity illusion, Michael J. Jackson, Michael L. Bush, Dennis Tompkins, Triumph International Inc, 1993-10-26, -
It turns out that in this context "builders" means shops that customize the frame to fit the customer based on a small number of basic designs. In the late 1950s early 1960s it was possible to order a customized frame from a bike shop in Cupertino which came from Italy (AFAICR) and took some time. Now there are a number of shops in the U.S. that do this.
Note that the skills needed to make a custom bicycle are the same as to make many other things, like the Wright Brothers (Wiki) making the first controllable airplane.
Salsa - all 2-wheel - web page does not mention building
Otis Guy - Custom Road & Mountain bikes
Ibis - sells bikes of their own design - does not seem to offer custom one off builds.
Breezer - sells bikes of their own design - does not seem to offer custom one off builds.
Gary Fisher (Wiki: one of the inventors of the modern mountain bike) - web page not active
Soulcraft - Customized steel bicycle frames - but not customer prototype designs
SyCip Designs - does not answer phone
Yuba Bikes - mainly for hauling kids but also 2-wheel cargo bikes
Marin Bikes (Wiki: Marin County California is the birthplace of mountain bike culture) - Bikes for: Mountain, Pavement, E-Bikes & Kids.
Fitz Cycles - Customized to fit you frames from standard designs - does not seem to be one off custom designs.
Caletti Cycles - Customized version of 7 basic designs.
SF Bay Area/NorCal Bicycle Frame Builders - 2015 list
Custom Frame Builders List by State/Country - 2004 list
Nova Cycles Supply - Tubes -The vast majority of bicycle frames are made of tubing using a minimum number of pieces. The ladder frame (Wiki) of the 427 Cobra is a very crude was to make a chassis. Car frames were made that way for many years. Then the Maserati Tipo 60 series (Wiki) "Bird Cage" revolutionized racing car frame design because it had high torsional stiffness. This was followed by the use of aircraft structural panels and Monocoque (Wiki) construction where the outer skin serves a structural function. Carbon Fiber seems to be used to make frames as opposed to from Monocoque structures.
Ref book: Racing and Sports Car Chassis Design, 1961 - space frame (Wiki) construction with crush zones at front and back.
The above construction methods may not have relevance to bicycles, but may offer better (lighter, stronger, stiffer) Trike and Quad chassis designs.
Some from book "Keep on Moving" by Allen B. Ballard - senior mobility options to replace a car
Adult Tricycle Review - limited number of reviews
Basically Bicycles - dealer with buying guides & Recumbent
Bike Forums - Electric Bikes,
Bike Highway - PFIFF only US dealer - Comfort 24 Ansmann Electric Tricycle (the model Ballard got in book)
Bike-On - wheelchairs, handicycles,recumbent &Etc dealer
Bicycle Man - Recumbent Dealer - Blog
Bicycle Riding for Boomers - Store with wide selection
Cycle Force Group - PFIFF - Facebook -
Day 6 Bikes - June 2019 only bicycles
eBikes SF -
Electric Bike - News page 1 has articles from 2019 and 2017... The 2018 BionX article ends with reorganization (they are now out of business). Technical articles back to 2012, but still valid.
Electric Bicycle Guide - Calculators - I think the Power Calculator only looks at the weight and slope to get the needed power for a given speed (does NOT include c.g. location).
Electric Bike Report - Forum - eTrike Guide -
Electric-Bikes - eTrikes,
Electric Bike-Blog -
Electroride -
Endless Sphere - Forums - started on eScooters, but now all encompassing
Evelo Bikes - Compass trike, EBR Review, Video review -
Hi-Power Cycles - HPC Bikes - all bicycles, no trikes
Hostel Shoppe - dealer: Recumbent FAQ
Laid Back Bike Report - In depth video reports - YouTube -
Map My Ride (App Store or Google Play) - only dealers that pay have links (nothing for Ukiah, CA)
PFIFF Germany - English - Vehicles - YouTube - Many of the trikes can be pulled apart seat, pedals & rear wheel as one unit. This might be replaced with a Bafang Max rear assembly?
Really Good eBikes - many models of the PFIFF -
Recumbent Cycle-Con - annual trade show & Convention -
Recumbent and Tandem Rider Magazine - The reviews index covers Adams to Zona -
Spikes Trikes - Terra Trike & Trident Trike dealer
Tadpole Rider blog by Steve Newbauer -
Trike Asylum blog by Steve Green - Fat Trikes - Amazon books -
True Bicycles -
Utah Trikes - vast selection and custom builds
Random collection from eBay.
11490 Spring-body carriage, Alexr Moffitt, 1854-08-08, -
241395 Velocipede, James A. McKenzie, 1881-05-10, -
D18820 Bicycle Frame, Marshall Starley, 1888-12-18 - Safety Bicycle (Wiki)
442871 Safety Bicycle, William J. Edwards, 1890-02-16, -
444258 Bicycle, Pardon W. Tillinghast, 1891-01-06, -
GB189400053 Improvements in the Construction of Bicycles and other Velocipedes, William Borthwick Smith, William Henry Starley, 1894-12-22, -
633746 Bicycle, James C Anderson, 1899-09-26, - Penny Farthing remote peddles
425390 Bicycle, Charles D. Rice, 1890-04-08, -
D115942 Bicycle, Frank W. Schwinn, 1939-08-01, -
Schwinn
1100261 Variable-speed gearing, Ignaz Schwinn, 1914-06-16, - planetary gear in hub
1111503 Bracket, Ignaz Schwinn, 1914-09-22, - used on handlebars
1190956 Cycle-standIgnaz Schwinn, 1916-07-11, - "U" shape pivots around rear axle
Velocipede Patents
Human-powered land vehicle according to Wiki, but the early patents show them also on water and rail-road tracks. The bone shaker dates from 1869. These were, and still are, difficult to ride and dangerous.
59915 Velocipede, P. Lallement New Haven, Conn., Nov 20, 1866, 280/259 -
RE7972 Velocipede, P. Lallement New Haven, Conn., Nov 27, 1877, 280/259 -
412322 velocipede, J.S. Copeland, Oct 8, 1889, 280/264; 280/276 - front suspension and front brake.
535065 Toe-clip for velocipede-pedals, H.W. Lester, Mar 5, 1895, 74/594.6 - as of 2019 these are 124 years old. I was first exposed to this design in the 1960 where I saw them fitted to imported "10 speed" bicycles when all the U.S. bicycles were 3-speed. No provision for a strap across the top of the foot.
618874 Bicycle, H.E. Henwood, Feb 7, 1899, 280/286 - modern layout but special springs for rear suspension
Safety Bicycle Patents
Started this paragraph after reading a Quora question. Quora: Why wasn't the bicycle invented long before 1817? - It has the lowest Cost of Transport (calories per gram per kilometer) i.e. about 1.5. The reason given relates to precision machining.
Interchangeable parts (Wiki) could have been available in 1765 but the French decided it was a bad idea. In 1816 North & Hall came close, but for rectangular parts. It was not until 1907 that the self aligning ball bearing was patented in Sweden No. 25406 (Wiki) (Wiki: Industrial Era) - The question cites 1817, but that's for a much less efficient bicycle (Wiki), i.e. the Safety Bicycle (Wiki) showed up around 1885 replacing the Penny Farthing (Wiki). The key difference being that the use of chain and gearing reduced the wheel size while maintaining the feet traveled per turn of the pedals.Roller Bicycle Chain (Wiki) first appeared around 1898 (Wiki)
The large front wheel was necessary in order to get the desired cadence (Wiki) of around 60 crank turns per minute while moving at a comfortable speed. A common way of specifying bicycle gearing (Wiki) is in terms of the diameter of a Penny Farthing front wheel in inches (Wiki: Gear Inches). A "medium" gearing is 70, i.e. a wheel 70" ( 5' 10") in diameter!
The Whippet bicycle (Wiki) started around 1885 and was an early adopter of the derailer.
439128 Safety bicycle, George B. Durkee, 1890-10-28, -
This is a single speed system that uses "cord" not chain for the drive.
442871 Safety bicycle, William J.Edwards, 1890-12-16, -
Single speed but using drive chain instead of cord. Front hand brake.
540977 Bicycle-chain brake, Frank G. Grove, 1895-06-11, -
For this to work there can be no freewheel (Wiki), i.e. the pedals always move in speed that depends on the speed of the rear wheel.
So, in this invention when back pressure is applied to the pedals there is an extra braking effect.
GB189417908 An Improved Chain Wheel for Velocipedes, capable of Expansion and Contraction while the Machine is in Motion, and Apparatus Pertaining thereto, Charles Montague Linley, John Biggs, John Archer, 1895-08-24, - Whippet
654053 Back-pedaling brake, Arthur Cuthbert, 1900-07-17, - provides for both a free-wheel and brake
It seems the modern bicycle dates from the turn of the century (1900).
From Sonobuoy - Ref. 61 @32:55
Based on a Peugeot bicycle reinforced to carry 450 pounds.
There are a number of YouTube videos showing various bicycles that have been adapted to ride the rails. This patent dates from 1899 so it's an idea that's been around for a long time.
638822 Railroad-bicycle, William B Turner, 1899-12-12, -
Ref 1. A Brief History of Bicycle Engineering, 8:29 -
Ref 2. DJI hub motor Avinox drive system - Amflow PL eMountain Bike - 2024Jly3: no pricing
Ref 3. Scientists Still Don't Know How Bicycles Work, 10:05, 2026Mar18 - relates to riderless stabilityRef 4. Bicycling Science, 4th Ed (book), Authors: David Gordon Wilson, Theodor Schmidt, Contributor: Jeremy J M. Papadopoulos -
Ref 5. How bikes *actually* work, 0:59, 2025 - Castor keeps riderless bikes upright
Ref 6. Most People Don't Know How Bikes Work, 11:21, 2022 - how to steer by truing in the opposite direction, Bike with reversed steering is impossible to ride.
Tilting Three Wheeler Patents - 3-wheel powered vehicles are legally motorcycles and have lower legal costs (insurance & license)
3 Wheel Recumbent Electric Bikes - this is one way to climb a mountain and maintain stability when going very slowly
Motorized Bikes - and Scooters - may have even lower legal costs than motorcycles if they meet some requirements
Cars - including 3-wheelers, How Balloon Tires work -
Gyroscopes - bicycle and motorcycle wheels are gyroscopes and have a strong impact on vehicle dynamics, but small motor scooter wheels not so much making them less safe.
DC Permanent Magnet Motors - Testing - Flywheel - Videos - Note that Kv (PRM/Volt i.e. "Turns" or "T") can be translated to Ki (Newton meters/amp) by using the correct units.
Hockney–Falco thesis - Guggenheim - Book/Catalog -
YouTube: ΦBK Visiting Scholar Charles Falco on: "The Art and Science of the Motorcycle" - also see Optics:
Endless-Sphere: Forums -
Grin - Motor Simulator - has a steep learning curve, but may be worth it.
Yuba Cargo Bikes - the electrified versions all use 250W motors, either hub or Bosch - aimed at hauling kits.
Cyclone Taiwan - motors - ebkit.com, sickbikeparts.com, lunacycle.com - LUNA 3d Cyclone Mount for 3000 watt - Taking on the Cyclone 3000W Mid- Drive…An Ebike Brute - Cyclone Motor Mid-Drive Guide for IDIOTS Needed! - 3kW Ebike Kit - Docs - Wiring - Wiring2 -
NuVinci continuously variable transmission (CVT) -
Brooke's PRC68, Alpha Index, Products for Sale, Home Page
Page created 23 Oct 2013.